{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
-
TRANSFORM_MATRIX (v3.2)
Use the android.
color Correction. transform matrix and android. color Correction. gains to do color conversion. All advanced white balance adjustments (not specified by our white balance pipeline) must be disabled.
If AWB is enabled with
android.,control. awb Mode != OFF then TRANSFORM_ MATRIX is ignored. The camera device will override this value to either FAST or HIGH_ QUALITY. -
FAST (v3.2)
Color correction processing must not slow down capture rate relative to sensor raw output.
Advanced white balance adjustments above and beyond the specified white balance pipeline may be applied.
If AWB is enabled with
android.,control. awb Mode != OFF then the camera device uses the last frame's AWB values (or defaults if AWB has never been run). -
HIGH_QUALITY (v3.2)
Color correction processing operates at improved quality but the capture rate might be reduced (relative to sensor raw output rate)
Advanced white balance adjustments above and beyond the specified white balance pipeline may be applied.
If AWB is enabled with
android.,control. awb Mode != OFF then the camera device uses the last frame's AWB values (or defaults if AWB has never been run).
The mode control selects how the image data is converted from the
sensor's native color into linear sRGB color.
3.
When auto-white balance (AWB) is enabled with android.
We define the expected processing pipeline below.
When either FAST or HIGH_
Switching to TRANSFORM_
The expected processing pipeline is as follows:

The white balance is encoded by two values,
The 4-channel white-balance gains are defined as:
android.where G_ is the gain for green pixels on even rows of the
output,G_ is the gain for green pixels on the odd rows.G_ value,G_ equal to
G_ in the output result metadata.
The matrices for color transforms are defined as a 9-entry vector:
android.which define a transform from input sensor colors,P_,P_,
with colors as follows:
r' = I0r + I1g + I2b
g' = I3r + I4g + I5b
b' = I6r + I7g + I8b
Both the input and output value ranges must match.
HAL must support both FAST and HIGH_
A color transform matrix to use to transform
from sensor RGB color space to output linear sRGB color space.
3.
This matrix is either set by the camera device when the request
android.
In the latter case,[0, (assuming input color
values is within the normalized range [0,),
The valid range of each matrix element varies on different devices,
Gains applying to Bayer raw color channels for
white-balance.
3.
These per-channel gains are either set by the camera device
when the request android.
The gains in the result metadata are the gains actually
applied by the camera device to the current frame.
The valid range of gains varies on different devices,
The 4-channel white-balance gains are defined in
the order of [R G_,G_ is the gain
for green pixels on even rows of the output,G_
is the gain for green pixels on the odd rows.
If a HAL does not support a separate gain for even/G_ value,G_ equal to G_ in the output result metadata.
-
OFF (v3.2)
No aberration correction is applied.
-
FAST (v3.2)
Aberration correction will not slow down capture rate relative to sensor raw output.
-
HIGH_QUALITY (v3.2)
Aberration correction operates at improved quality but the capture rate might be reduced (relative to sensor raw output rate)
Mode of operation for the chromatic aberration correction algorithm.
3.
Chromatic (color) aberration is caused by the fact that different wavelengths of light
can not focus on the same point after exiting from the lens.
FAST/
LEGACY devices will always be in FAST mode.
-
TRANSFORM_MATRIX (v3.2)
Use the android.
color Correction. transform matrix and android. color Correction. gains to do color conversion. All advanced white balance adjustments (not specified by our white balance pipeline) must be disabled.
If AWB is enabled with
android.,control. awb Mode != OFF then TRANSFORM_ MATRIX is ignored. The camera device will override this value to either FAST or HIGH_ QUALITY. -
FAST (v3.2)
Color correction processing must not slow down capture rate relative to sensor raw output.
Advanced white balance adjustments above and beyond the specified white balance pipeline may be applied.
If AWB is enabled with
android.,control. awb Mode != OFF then the camera device uses the last frame's AWB values (or defaults if AWB has never been run). -
HIGH_QUALITY (v3.2)
Color correction processing operates at improved quality but the capture rate might be reduced (relative to sensor raw output rate)
Advanced white balance adjustments above and beyond the specified white balance pipeline may be applied.
If AWB is enabled with
android.,control. awb Mode != OFF then the camera device uses the last frame's AWB values (or defaults if AWB has never been run).
The mode control selects how the image data is converted from the
sensor's native color into linear sRGB color.
3.
When auto-white balance (AWB) is enabled with android.
We define the expected processing pipeline below.
When either FAST or HIGH_
Switching to TRANSFORM_
The expected processing pipeline is as follows:
The white balance is encoded by two values,
The 4-channel white-balance gains are defined as:
android.where G_ is the gain for green pixels on even rows of the
output,G_ is the gain for green pixels on the odd rows.G_ value,G_ equal to
G_ in the output result metadata.
The matrices for color transforms are defined as a 9-entry vector:
android.which define a transform from input sensor colors,P_,P_,
with colors as follows:
r' = I0r + I1g + I2b
g' = I3r + I4g + I5b
b' = I6r + I7g + I8b
Both the input and output value ranges must match.
HAL must support both FAST and HIGH_
A color transform matrix to use to transform
from sensor RGB color space to output linear sRGB color space.
3.
This matrix is either set by the camera device when the request
android.
In the latter case,[0, (assuming input color
values is within the normalized range [0,),
The valid range of each matrix element varies on different devices,
Gains applying to Bayer raw color channels for
white-balance.
3.
These per-channel gains are either set by the camera device
when the request android.
The gains in the result metadata are the gains actually
applied by the camera device to the current frame.
The valid range of gains varies on different devices,
The 4-channel white-balance gains are defined in
the order of [R G_,G_ is the gain
for green pixels on even rows of the output,G_
is the gain for green pixels on the odd rows.
If a HAL does not support a separate gain for even/G_ value,G_ equal to G_ in the output result metadata.
-
OFF (v3.2)
No aberration correction is applied.
-
FAST (v3.2)
Aberration correction will not slow down capture rate relative to sensor raw output.
-
HIGH_QUALITY (v3.2)
Aberration correction operates at improved quality but the capture rate might be reduced (relative to sensor raw output rate)
Mode of operation for the chromatic aberration correction algorithm.
3.
Chromatic (color) aberration is caused by the fact that different wavelengths of light
can not focus on the same point after exiting from the lens.
FAST/
LEGACY devices will always be in FAST mode.
List of aberration correction modes for android.
Any value listed in android.
3.
This key lists the valid modes for android.
Camera devices that support the MANUAL_
LEGACY devices will always only support FAST mode.
HAL must support both FAST and HIGH_
-
OFF (v3.2)
The camera device will not adjust exposure duration to avoid banding problems.
-
50HZ (v3.2)
The camera device will adjust exposure duration to avoid banding problems with 50Hz illumination sources.
-
60HZ (v3.2)
The camera device will adjust exposure duration to avoid banding problems with 60Hz illumination sources.
-
AUTO (v3.2)
The camera device will automatically adapt its antibanding routine to the current illumination condition.
This is the default mode if AUTO is available on given camera device.
The desired setting for the camera device's auto-exposure
algorithm's antibanding compensation.
3.
Some kinds of lighting fixtures,
Therefore,
A given camera device may not support all of the possible
options for the antibanding mode.
AUTO mode is the default if it is available on given
camera device.
If manual exposure control is enabled (by setting
android.
For all capture request templates,
If manual exposure control is enabled (by setting
android.
Adjustment to auto-exposure (AE) target image
brightness.
3.
The adjustment is measured as a count of steps,
For example,!= OFF.== true.
In the event of exposure compensation value being changed,
-
OFF (v3.2)
Auto-exposure lock is disabled; the AE algorithm is free to update its parameters.
-
ON (v3.2)
Auto-exposure lock is enabled; the AE algorithm must not update the exposure and sensitivity parameters while the lock is active.
android.
control. ae Exposure Compensation setting changes will still take effect while auto-exposure is locked. Some rare LEGACY devices may not support this,
in which case the value will always be overridden to OFF.
Whether auto-exposure (AE) is currently locked to its latest
calculated values.
3.
When set to true (ON),false (OFF).
Note that even when AE is locked,
When android.
If AE precapture is triggered (see android.
When an AE precapture sequence is triggered,false.
Since the camera device has a pipeline of in-flight requests,
- Starting in auto-AE mode:
- Lock AE
- Wait for the first result to be output that has the AE locked
- Copy exposure settings from that result into a request,
set the request to manual AE - Submit the capture request,
proceed to run manual AE as desired.
See android.
-
OFF (v3.2)
The camera device's autoexposure routine is disabled.
The application-selected android.
sensor. exposure Time, android. sensor. sensitivity and android. sensor. frame Duration are used by the camera device, along with android. flash. * fields, if there's a flash unit for this camera device. Note that auto-white balance (AWB) and auto-focus (AF) behavior is device dependent when AE is in OFF mode.
To have consistent behavior across different devices, it is recommended to either set AWB and AF to OFF mode or lock AWB and AF before setting AE to OFF. See android. control. awb Mode, android. control. af Mode, android. control. awb Lock, and android. control. af Trigger for more details. LEGACY devices do not support the OFF mode and will override attempts to use this value to ON.
-
ON (v3.2)
The camera device's autoexposure routine is active,
with no flash control. The application's values for android.
sensor. exposure Time, android. sensor. sensitivity, and android. sensor. frame Duration are ignored. The application has control over the various android. flash. * fields. -
ON_AUTO_FLASH (v3.2)
Like ON,
except that the camera device also controls the camera's flash unit, firing it in low-light conditions. The flash may be fired during a precapture sequence (triggered by android.
control. ae Precapture Trigger) and may be fired for captures for which the android. control. capture Intent field is set to STILL_ CAPTURE -
ON_ALWAYS_FLASH (v3.2)
Like ON,
except that the camera device also controls the camera's flash unit, always firing it for still captures. The flash may be fired during a precapture sequence (triggered by android.
control. ae Precapture Trigger) and will always be fired for captures for which the android. control. capture Intent field is set to STILL_ CAPTURE -
ON_AUTO_FLASH_REDEYE (v3.2)
Like ON_
AUTO_ FLASH, but with automatic red eye reduction. If deemed necessary by the camera device,
a red eye reduction flash will fire during the precapture sequence. -
ON_EXTERNAL_FLASH (v3.3)
An external flash has been turned on.
It informs the camera device that an external flash has been turned on,
and that metering (and continuous focus if active) should be quickly recaculated to account for the external flash. Otherwise, this mode acts like ON. When the external flash is turned off,
AE mode should be changed to one of the other available AE modes. If the camera device supports AE external flash mode,
android. control. ae State must be FLASH_ REQUIRED after the camera device finishes AE scan and it's too dark without flash.
The desired mode for the camera device's
auto-exposure routine.
3.
This control is only effective if android.
When set to any of the ON modes,
The FLASH modes are only available if the camera device
has a flash unit (android.true).
If flash TORCH mode is desired,
When set to any of the ON modes,
List of metering areas to use for auto-exposure adjustment.
Coordinates must be between [(0, of
android.
3.
Not available if android.
The maximum number of regions supported by the device is determined by the value
of android.
For devices not supporting android.
For devices supporting android.(0, being the top-left pixel of the pre-correction active array,(0, being the top-left pixel of the active array,
The weight must be within [0,,
The weights are relative to weights of other exposure metering regions,
If all regions have 0 weight,
If the metering region is outside the used android.
When setting the AE metering regions,
Starting from API level 30,
For camera devices with the
Camera
The HAL level representation of MeteringRectangle[] is a
int[5 * area_
Range over which the auto-exposure routine can
adjust the capture frame rate to maintain good
exposure.
Any of the entries in android.
3.
Only constrains auto-exposure (AE) algorithm,
-
IDLE (v3.2)
The trigger is idle.
-
START (v3.2)
The precapture metering sequence will be started by the camera device.
The exact effect of the precapture trigger depends on the current AE mode and state.
-
CANCEL (v3.2)
The camera device will cancel any currently active or completed precapture metering sequence,
the auto-exposure routine will return to its initial state.
Whether the camera device will trigger a precapture
metering sequence when it processes this request.
3.
This entry is normally set to IDLE,
When set to CANCEL,
The precapture sequence should be triggered before starting a
high-quality still capture for final metering decisions to
be made,
Normally,
When a precapture metering sequence is finished,android.).android.,android.,
The exact effect of auto-exposure (AE) precapture trigger
depends on the current AE mode and state; see
android.
On LEGACY-level devices,
Using the precapture trigger and the auto-focus trigger android.
If both the precapture and the auto-focus trigger are activated on the same request,
The HAL must support triggering the AE precapture trigger while an AF trigger is active
(and vice versa),
-
OFF (v3.2)
The auto-focus routine does not control the lens; android.
lens. focus Distance is controlled by the application. -
AUTO (v3.2)
Basic automatic focus mode.
In this mode,
the lens does not move unless the autofocus trigger action is called. When that trigger is activated, AF will transition to ACTIVE_ SCAN, then to the outcome of the scan (FOCUSED or NOT_ FOCUSED). Always supported if lens is not fixed focus.
Use android.
lens. info. minimum Focus Distance to determine if lens is fixed-focus. Triggering AF_
CANCEL resets the lens position to default, and sets the AF state to INACTIVE. -
MACRO (v3.2)
Close-up focusing mode.
In this mode,
the lens does not move unless the autofocus trigger action is called. When that trigger is activated, AF will transition to ACTIVE_ SCAN, then to the outcome of the scan (FOCUSED or NOT_ FOCUSED). This mode is optimized for focusing on objects very close to the camera. When that trigger is activated,
AF will transition to ACTIVE_ SCAN, then to the outcome of the scan (FOCUSED or NOT_ FOCUSED). Triggering cancel AF resets the lens position to default, and sets the AF state to INACTIVE. -
CONTINUOUS_VIDEO (v3.2)
In this mode,
the AF algorithm modifies the lens position continually to attempt to provide a constantly-in-focus image stream. The focusing behavior should be suitable for good quality video recording; typically this means slower focus movement and no overshoots.
When the AF trigger is not involved, the AF algorithm should start in INACTIVE state, and then transition into PASSIVE_ SCAN and PASSIVE_ FOCUSED states as appropriate. When the AF trigger is activated, the algorithm should immediately transition into AF_ FOCUSED or AF_ NOT_ FOCUSED as appropriate, and lock the lens position until a cancel AF trigger is received. Once cancel is received,
the algorithm should transition back to INACTIVE and resume passive scan. Note that this behavior is not identical to CONTINUOUS_ PICTURE, since an ongoing PASSIVE_ SCAN must immediately be canceled. -
CONTINUOUS_PICTURE (v3.2)
In this mode,
the AF algorithm modifies the lens position continually to attempt to provide a constantly-in-focus image stream. The focusing behavior should be suitable for still image capture; typically this means focusing as fast as possible.
When the AF trigger is not involved, the AF algorithm should start in INACTIVE state, and then transition into PASSIVE_ SCAN and PASSIVE_ FOCUSED states as appropriate as it attempts to maintain focus. When the AF trigger is activated, the algorithm should finish its PASSIVE_ SCAN if active, and then transition into AF_ FOCUSED or AF_ NOT_ FOCUSED as appropriate, and lock the lens position until a cancel AF trigger is received. When the AF cancel trigger is activated,
the algorithm should transition back to INACTIVE and then act as if it has just been started. -
EDOF (v3.2)
Extended depth of field (digital focus) mode.
The camera device will produce images with an extended depth of field automatically; no special focusing operations need to be done before taking a picture.
AF triggers are ignored,
and the AF state will always be INACTIVE.
Whether auto-focus (AF) is currently enabled,
3.
Only effective if android.android.).
If the lens is controlled by the camera device auto-focus algorithm,
When afMode is AUTO or MACRO,== START).
When afMode is one of the continuous auto focus modes,
When afMode is OFF,
To put this in concrete terms,
List of metering areas to use for auto-focus.
Coordinates must be between [(0, of
android.
3.
Not available if android.
The maximum number of focus areas supported by the device is determined by the value
of android.
For devices not supporting android.
For devices supporting android.(0, being the top-left pixel of the pre-correction active array,(0, being the top-left pixel of the active array,
The weight must be within [0,,
The weights are relative to weights of other metering regions,
If all regions have 0 weight,
If the metering region is outside the used android.
When setting the AF metering regions,
Starting from API level 30,
For camera devices with the
Camera
The HAL level representation of MeteringRectangle[] is a
int[5 * area_
-
IDLE (v3.2)
The trigger is idle.
-
START (v3.2)
Autofocus will trigger now.
-
CANCEL (v3.2)
Autofocus will return to its initial state,
and cancel any currently active trigger.
Whether the camera device will trigger autofocus for this request.
3.
This entry is normally set to IDLE,
When included and set to START,
When set to CANCEL,
Generally,
See android.
Using the autofocus trigger and the precapture trigger android.
The HAL must support triggering the AF trigger while an AE precapture trigger is active
(and vice versa),
-
OFF (v3.2)
Auto-white balance lock is disabled; the AWB algorithm is free to update its parameters if in AUTO mode.
-
ON (v3.2)
Auto-white balance lock is enabled; the AWB algorithm will not update its parameters while the lock is active.
Whether auto-white balance (AWB) is currently locked to its
latest calculated values.
3.
When set to true (ON),false (OFF).
Since the camera device has a pipeline of in-flight requests,
- Starting in auto-AWB mode:
- Lock AWB
- Wait for the first result to be output that has the AWB locked
- Copy AWB settings from that result into a request,
set the request to manual AWB - Submit the capture request,
proceed to run manual AWB as desired.
Note that AWB lock is only meaningful when
android.
Some LEGACY devices may not support ON; the value is then overridden to OFF.
-
OFF (v3.2)
The camera device's auto-white balance routine is disabled.
The application-selected color transform matrix (android.
color Correction. transform) and gains (android. color Correction. gains) are used by the camera device for manual white balance control. -
AUTO (v3.2)
The camera device's auto-white balance routine is active.
The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
INCANDESCENT (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses incandescent light as the assumed scene illumination for white balance.
While the exact white balance transforms are up to the camera device,
they will approximately match the CIE standard illuminant A. The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
FLUORESCENT (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses fluorescent light as the assumed scene illumination for white balance.
While the exact white balance transforms are up to the camera device,
they will approximately match the CIE standard illuminant F2. The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
WARM_FLUORESCENT (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses warm fluorescent light as the assumed scene illumination for white balance.
While the exact white balance transforms are up to the camera device,
they will approximately match the CIE standard illuminant F4. The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
DAYLIGHT (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses daylight light as the assumed scene illumination for white balance.
While the exact white balance transforms are up to the camera device,
they will approximately match the CIE standard illuminant D65. The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
CLOUDY_DAYLIGHT (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses cloudy daylight light as the assumed scene illumination for white balance.
The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
TWILIGHT (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses twilight light as the assumed scene illumination for white balance.
The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
SHADE (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses shade light as the assumed scene illumination for white balance.
The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request.
Whether auto-white balance (AWB) is currently setting the color
transform fields,
3.
This control is only effective if android.
When set to the AUTO mode,
When set to the OFF mode,
When set to any other modes,
List of metering areas to use for auto-white-balance illuminant
estimation.
Coordinates must be between [(0, of
android.
3.
Not available if android.
The maximum number of regions supported by the device is determined by the value
of android.
For devices not supporting android.
For devices supporting android.(0, being the top-left pixel of the pre-correction active array,(0, being the top-left pixel of the active array,
The weight must range from 0 to 1000,
The weights are relative to weights of other white balance metering regions,
If all regions have 0 weight,
If the metering region is outside the used android.
When setting the AWB metering regions,
Starting from API level 30,
For camera devices with the
Camera
The HAL level representation of MeteringRectangle[] is a
int[5 * area_
-
CUSTOM (v3.2)
The goal of this request doesn't fall into the other categories.
The camera device will default to preview-like behavior. -
PREVIEW (v3.2)
This request is for a preview-like use case.
The precapture trigger may be used to start off a metering w/
flash sequence. -
STILL_CAPTURE (v3.2)
This request is for a still capture-type use case.
If the flash unit is under automatic control,
it may fire as needed. -
VIDEO_RECORD (v3.2)
This request is for a video recording use case.
-
VIDEO_SNAPSHOT (v3.2)
This request is for a video snapshot (still image while recording video) use case.
The camera device should take the highest-quality image possible (given the other settings) without disrupting the frame rate of video recording.
-
ZERO_SHUTTER_LAG (v3.2)
This request is for a ZSL usecase; the application will stream full-resolution images and reprocess one or several later for a final capture.
-
MANUAL (v3.2)
This request is for manual capture use case where the applications want to directly control the capture parameters.
For example,
the application may wish to manually control android. sensor. exposure Time, android. sensor. sensitivity, etc. -
MOTION_TRACKING (v3.3)
This request is for a motion tracking use case,
where the application will use camera and inertial sensor data to locate and track objects in the world. The camera device auto-exposure routine will limit the exposure time of the camera to no more than 20 milliseconds,
to minimize motion blur.
Information to the camera device 3A (auto-exposure,
3.
This control (except for MANUAL) is only effective if
android. and any 3A routine is active.
All intents are supported by all devices,
- ZERO_
SHUTTER_ LAG will be supported if android. request. available Capabilities contains PRIVATE_ REPROCESSING or YUV_ REPROCESSING. - MANUAL will be supported if android.
request. available Capabilities contains MANUAL_ SENSOR. - MOTION_
TRACKING will be supported if android. request. available Capabilities contains MOTION_ TRACKING.
-
OFF (v3.2)
No color effect will be applied.
-
MONO (v3.2)
[optional]
A "monocolor" effect where the image is mapped into a single color.
This will typically be grayscale.
-
NEGATIVE (v3.2)
[optional]
A "photo-negative" effect where the image's colors are inverted.
-
SOLARIZE (v3.2)
[optional]
A "solarisation" effect (Sabattier effect) where the image is wholly or partially reversed in tone.
-
SEPIA (v3.2)
[optional]
A "sepia" effect where the image is mapped into warm gray,
red, and brown tones. -
POSTERIZE (v3.2)
[optional]
A "posterization" effect where the image uses discrete regions of tone rather than a continuous gradient of tones.
-
WHITEBOARD (v3.2)
[optional]
A "whiteboard" effect where the image is typically displayed as regions of white,
with black or grey details. -
BLACKBOARD (v3.2)
[optional]
A "blackboard" effect where the image is typically displayed as regions of black,
with white or grey details. -
AQUA (v3.2)
[optional]
An "aqua" effect where a blue hue is added to the image.
A special color effect to apply.
3.
When this mode is set,
-
OFF (v3.2)
Full application control of pipeline.
All control by the device's metering and focusing (3A) routines is disabled,
and no other settings in android. control. * have any effect, except that android. control. capture Intent may be used by the camera device to select post-processing values for processing blocks that do not allow for manual control, or are not exposed by the camera API. However,
the camera device's 3A routines may continue to collect statistics and update their internal state so that when control is switched to AUTO mode, good control values can be immediately applied. -
AUTO (v3.2)
Use settings for each individual 3A routine.
Manual control of capture parameters is disabled.
All controls in android. control. * besides sceneMode take effect. -
USE_SCENE_MODE (v3.2)
[optional]
Use a specific scene mode.
Enabling this disables control.
aeMode, control. awbMode and control. afMode controls; the camera device will ignore those settings while USE_ SCENE_ MODE is active (except for FACE_ PRIORITY scene mode). Other control entries are still active. This setting can only be used if scene mode is supported (i. e. android. control. available Scene Modes contain some modes other than DISABLED). For extended scene modes such as BOKEH,
please use USE_ EXTENDED_ SCENE_ MODE instead. -
OFF_KEEP_STATE (v3.2)
[optional]
Same as OFF mode,
except that this capture will not be used by camera device background auto-exposure, auto-white balance and auto-focus algorithms (3A) to update their statistics. Specifically,
the 3A routines are locked to the last values set from a request with AUTO, OFF, or USE_ SCENE_ MODE, and any statistics or state updates collected from manual captures with OFF_ KEEP_ STATE will be discarded by the camera device. -
USE_EXTENDED_SCENE_MODE (v3.5)
[optional]
Use a specific extended scene mode.
When extended scene mode is on,
the camera device may override certain control parameters, such as targetFpsRange, AE, AWB, and AF modes, to achieve best power and quality tradeoffs. Only the mandatory stream combinations of LIMITED hardware level are guaranteed. This setting can only be used if extended scene mode is supported (i.
e. android. control. available Extended Scene Modes contains some modes other than DISABLED).
Overall mode of 3A (auto-exposure,
3.
This is a top-level 3A control switch.
When set to AUTO,
When set to USE_
When set to OFF_
-
DISABLED (v3.2)
0
Indicates that no scene modes are set for a given capture request.
-
FACE_PRIORITY (v3.2)
If face detection support exists,
use face detection data for auto-focus, auto-white balance, and auto-exposure routines. If face detection statistics are disabled (i.
e. android. statistics. face Detect Mode is set to OFF), this should still operate correctly (but will not return face detection statistics to the framework). Unlike the other scene modes,
android. control. ae Mode, android. control. awb Mode, and android. control. af Mode remain active when FACE_ PRIORITY is set. -
ACTION (v3.2)
[optional]
Optimized for photos of quickly moving objects.
Similar to SPORTS.
-
PORTRAIT (v3.2)
[optional]
Optimized for still photos of people.
-
LANDSCAPE (v3.2)
[optional]
Optimized for photos of distant macroscopic objects.
-
NIGHT (v3.2)
[optional]
Optimized for low-light settings.
-
NIGHT_PORTRAIT (v3.2)
[optional]
Optimized for still photos of people in low-light settings.
-
THEATRE (v3.2)
[optional]
Optimized for dim,
indoor settings where flash must remain off. -
BEACH (v3.2)
[optional]
Optimized for bright,
outdoor beach settings. -
SNOW (v3.2)
[optional]
Optimized for bright,
outdoor settings containing snow. -
SUNSET (v3.2)
[optional]
Optimized for scenes of the setting sun.
-
STEADYPHOTO (v3.2)
[optional]
Optimized to avoid blurry photos due to small amounts of device motion (for example: due to hand shake).
-
FIREWORKS (v3.2)
[optional]
Optimized for nighttime photos of fireworks.
-
SPORTS (v3.2)
[optional]
Optimized for photos of quickly moving people.
Similar to ACTION.
-
PARTY (v3.2)
[optional]
Optimized for dim,
indoor settings with multiple moving people. -
CANDLELIGHT (v3.2)
[optional]
Optimized for dim settings where the main light source is a candle.
-
BARCODE (v3.2)
[optional]
Optimized for accurately capturing a photo of barcode for use by camera applications that wish to read the barcode value.
-
HIGH_SPEED_VIDEO (v3.2)
[deprecated]
[optional]
[java_public]
This is deprecated,
please use CameraDevice#createConstrainedHighSpeedCaptureSession and CameraConstrainedHighSpeedCaptureSession#createHighSpeedRequestList for high speed video recording. Optimized for high speed video recording (frame rate >=60fps) use case.
The supported high speed video sizes and fps ranges are specified in android.
control. available High Speed Video Configurations. To get desired output frame rates, the application is only allowed to select video size and fps range combinations listed in this static metadata. The fps range can be control via android. control. ae Target Fps Range. In this mode,
the camera device will override aeMode, awbMode, and afMode to ON, ON, and CONTINUOUS_ VIDEO, respectively. All post-processing block mode controls will be overridden to be FAST. Therefore, no manual control of capture and post-processing parameters is possible. All other controls operate the same as when android. control. mode == AUTO. This means that all other android. control. * fields continue to work, such as - android.
control. ae Target Fps Range - android.
control. ae Exposure Compensation - android.
control. ae Lock - android.
control. awb Lock - android.
control. effect Mode - android.
control. ae Regions - android.
control. af Regions - android.
control. awb Regions - android.
control. af Trigger - android.
control. ae Precapture Trigger - android.
control. zoom Ratio
Outside of android.
control. *, the following controls will work: - android.
flash. mode (automatic flash for still capture will not work since aeMode is ON) - android.
lens. optical Stabilization Mode (if it is supported) - android.
scaler. crop Region - android.
statistics. face Detect Mode
For high speed recording use case,
the actual maximum supported frame rate may be lower than what camera can output, depending on the destination Surfaces for the image data. For example, if the destination surface is from video encoder, the application need check if the video encoder is capable of supporting the high frame rate for a given video size, or it will end up with lower recording frame rate. If the destination surface is from preview window, the preview frame rate will be bounded by the screen refresh rate. The camera device will only support up to 2 output high speed streams (processed non-stalling format defined in android.
request. max Num Output Streams) in this mode. This control will be effective only if all of below conditions are true: - The application created no more than maxNumHighSpeedStreams processed non-stalling
format output streams,
where maxNumHighSpeedStreams is calculated as min(2, android. request. max Num Output Streams[Processed (but not-stalling)]). - The stream sizes are selected from the sizes reported by
android.
control. available High Speed Video Configurations. - No processed non-stalling or raw streams are configured.
When above conditions are NOT satisfied,
the controls of this mode and android. control. ae Target Fps Range will be ignored by the camera device, the camera device will fall back to android. control. mode ==AUTO,and the returned capture result metadata will give the fps range chosen by the camera device. Switching into or out of this mode may trigger some camera ISP/
sensor reconfigurations, which may introduce extra latency. It is recommended that the application avoids unnecessary scene mode switch as much as possible. - android.
-
HDR (v3.2)
[optional]
Turn on a device-specific high dynamic range (HDR) mode.
In this scene mode,
the camera device captures images that keep a larger range of scene illumination levels visible in the final image. For example, when taking a picture of a object in front of a bright window, both the object and the scene through the window may be visible when using HDR mode, while in normal AUTO mode, one or the other may be poorly exposed. As a tradeoff, HDR mode generally takes much longer to capture a single image, has no user control, and may have other artifacts depending on the HDR method used. Therefore,
HDR captures operate at a much slower rate than regular captures. In this mode,
on LIMITED or FULL devices, when a request is made with a android. control. capture Intent of STILL_ CAPTURE, the camera device will capture an image using a high dynamic range capture technique. On LEGACY devices, captures that target a JPEG-format output will be captured with HDR, and the capture intent is not relevant. The HDR capture may involve the device capturing a burst of images internally and combining them into one,
or it may involve the device using specialized high dynamic range capture hardware. In all cases, a single image is produced in response to a capture request submitted while in HDR mode. Since substantial post-processing is generally needed to produce an HDR image,
only YUV, PRIVATE, and JPEG outputs are supported for LIMITED/ FULL device HDR captures, and only JPEG outputs are supported for LEGACY HDR captures. Using a RAW output for HDR capture is not supported. Some devices may also support always-on HDR,
which applies HDR processing at full frame rate. For these devices, intents other than STILL_ CAPTURE will also produce an HDR output with no frame rate impact compared to normal operation, though the quality may be lower than for STILL_ CAPTURE intents. If SCENE_
MODE_ HDR is used with unsupported output types or capture intents, the images captured will be as if the SCENE_ MODE was not enabled at all. -
FACE_PRIORITY_LOW_LIGHT (v3.2)
[optional]
[hidden]
Same as FACE_
PRIORITY scene mode, except that the camera device will choose higher sensitivity values (android. sensor. sensitivity) under low light conditions. The camera device may be tuned to expose the images in a reduced sensitivity range to produce the best quality images.
For example, if the android. sensor. info. sensitivity Range gives range of [100, 1600], the camera device auto-exposure routine tuning process may limit the actual exposure sensitivity range to [100, 1200] to ensure that the noise level isn't excessive in order to preserve the image quality. Under this situation, the image under low light may be under-exposed when the sensor max exposure time (bounded by the android. control. ae Target Fps Range when android. control. ae Mode is one of the ON_ * modes) and effective max sensitivity are reached. This scene mode allows the camera device auto-exposure routine to increase the sensitivity up to the max sensitivity specified by android. sensor. info. sensitivity Range when the scene is too dark and the max exposure time is reached. The captured images may be noisier compared with the images captured in normal FACE_ PRIORITY mode; therefore, it is recommended that the application only use this scene mode when it is capable of reducing the noise level of the captured images. Unlike the other scene modes,
android. control. ae Mode, android. control. awb Mode, and android. control. af Mode remain active when FACE_ PRIORITY_ LOW_ LIGHT is set. -
DEVICE_CUSTOM_START (v3.2)
[optional]
[hidden]
100
Scene mode values within the range of
[DEVICE_are reserved for device specific customized scene modes.CUSTOM_ START, DEVICE_ CUSTOM_ END] -
DEVICE_CUSTOM_END (v3.2)
[optional]
[hidden]
127
Scene mode values within the range of
[DEVICE_are reserved for device specific customized scene modes.CUSTOM_ START, DEVICE_ CUSTOM_ END]
Control for which scene mode is currently active.
3.
Scene modes are custom camera modes optimized for a certain set of conditions and
capture settings.
This is the mode that that is active when
android..
The interpretation and implementation of these scene modes is left
to the implementor of the camera device.
HAL implementations that include scene modes are expected to provide
the per-scene settings to use for android.
For HIGH_
-
OFF (v3.2)
Video stabilization is disabled.
-
ON (v3.2)
Video stabilization is enabled.
-
PREVIEW_STABILIZATION (v3.8)
[optional]
Preview stabilization,
where the preview in addition to all other non-RAW streams are stabilized with the same quality of stabilization, is enabled. This mode aims to give clients a 'what you see is what you get' effect. In this mode, the FoV reduction will be a maximum of 20 % both horizontally and vertically (10% from left, right, top, bottom) for the given zoom ratio / crop region. The resultant FoV will also be the same across all processed streams (that have the same aspect ratio).
Whether video stabilization is
active.
3.
Video stabilization automatically warps images from
the camera in order to stabilize motion between consecutive frames.
If enabled,
Switching between different video stabilization modes may take several
frames to initialize,
In addition,
If a camera device supports both this mode and OIS
(android.
If video stabilization is set to "PREVIEW_
When this key is set to "PREVIEW_
This is in order for look-ahead time period to be short enough
for preview to match video recording for real-time usage.
The amount of additional sensitivity boost applied to output images
after RAW sensor data is captured.
3.
Some camera devices support additional digital sensitivity boosting in the
camera processing pipeline after sensor RAW image is captured.
This key will be null for devices that do not support any RAW format
outputs.100 in this key.
If the camera device cannot apply the exact boost requested,
For devices that support post RAW sensitivity boost,android.
The sensitivity of RAW format images will always be android.
This control is only effective if android.
-
FALSE (v3.2)
Requests with android.
control. capture Intent == STILL_ CAPTURE must be captured after previous requests. -
TRUE (v3.2)
Requests with android.
control. capture Intent == STILL_ CAPTURE may or may not be captured before previous requests.
Allow camera device to enable zero-shutter-lag mode for requests with
android.
3.
If enableZsl is true,
For example,
The output images for request B may have contents captured before the output images for
request A,
Note that when enableZsl is true,
For applications targeting SDK versions O and newer,true.false if present.
For applications targeting SDK versions older than O,false if present.
For application-operated ZSL,
It is valid for HAL to produce regular output images for requests with STILL_
-
DISABLED (v3.5)
0
Extended scene mode is disabled.
-
BOKEH_STILL_CAPTURE (v3.5)
High quality bokeh mode is enabled for all non-raw streams (including YUV,
JPEG, and IMPLEMENTATION_ DEFINED) when capture intent is STILL_ CAPTURE. Due to the extra image processing, this mode may introduce additional stall to non-raw streams. This mode should be used in high quality still capture use case. -
BOKEH_CONTINUOUS (v3.5)
Bokeh effect must not slow down capture rate relative to sensor raw output,
and the effect is applied to all processed streams no larger than the maximum streaming dimension. This mode should be used if performance and power are a priority, such as video recording. -
VENDOR_START (v3.5)
[hidden]
0x40
Vendor defined extended scene modes.
These depend on vendor implementation.
Whether extended scene mode is enabled for a particular capture request.
3.
With bokeh mode,
When set to BOKEH_
When set to BOKEH_
- If the camera device has BURST_
CAPTURE capability, the frame rate requirement of BURST_ CAPTURE must still be met. - All streams not larger than the maximum streaming dimension for BOKEH_
STILL_ CAPTURE mode (queried via Camera Characteristics#CONTROL_ AVAILABLE_ EXTENDED_ SCENE_ MODE_ CAPABILITIES) will have preview bokeh effect applied.
When set to BOKEH_
Switching between different extended scene modes may involve reconfiguration of the camera
pipeline,
For a logical multi-camera,
The desired zoom ratio
3.
Instead of using android.
By using this control,
- Zooming in from a wide-angle lens to a telephoto lens: A floating-point ratio provides
better precision compared to an integer value of android.
scaler. crop Region. - Zooming out from a wide lens to an ultrawide lens: zoomRatio supports zoom-out whereas
android.
scaler. crop Region doesn't.
To illustrate,(2000,.
- Camera Configuration:
- Active array size:
2000x1500(3 MP,4:3 aspect ratio) - Output stream #1:
640x480(VGA,4:3 aspect ratio) - Output stream #2:
1280x720(720p,16:9 aspect ratio)
- Active array size:
- Case #1: 4:3 crop region with 2.
0x zoom ratio - Zoomed field of view: 1/
4 of original field of view - Crop region:
Rect(0,(post zoom)0, 2000, 1500) // (left, top, right, bottom)
- Zoomed field of view: 1/
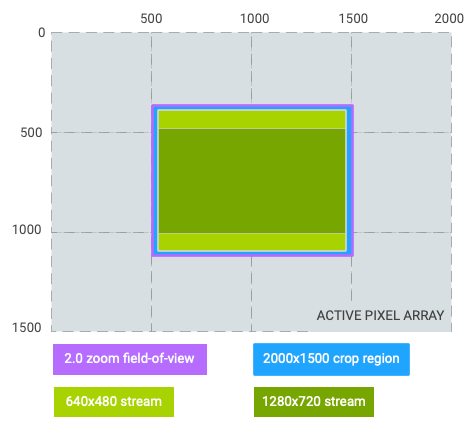
640x480stream source area:(0,(equal to crop region)0, 2000, 1500) 1280x720stream source area:(0,(letterboxed)187, 2000, 1312)
- Case #2: 16:9 crop region with 2.
0x zoom. - Zoomed field of view: 1/
4 of original field of view - Crop region:
Rect(0,187, 2000, 1312) 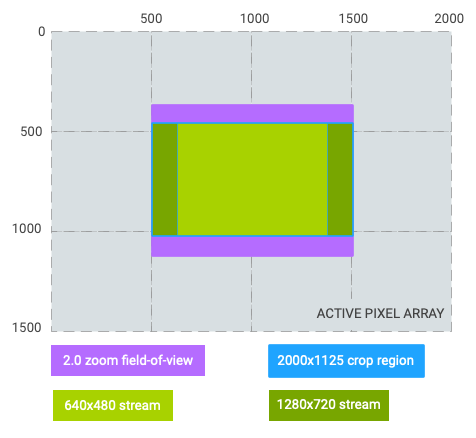
640x480stream source area:(250,(pillarboxed)187, 1750, 1312) 1280x720stream source area:(0,(equal to crop region)187, 2000, 1312)
- Zoomed field of view: 1/
- Case #3: 1:1 crop region with 0.
5x zoom out to ultrawide lens. - Zoomed field of view: 4x of original field of view (switched from wide lens to ultrawide lens)
- Crop region:
Rect(250,0, 1750, 1500) 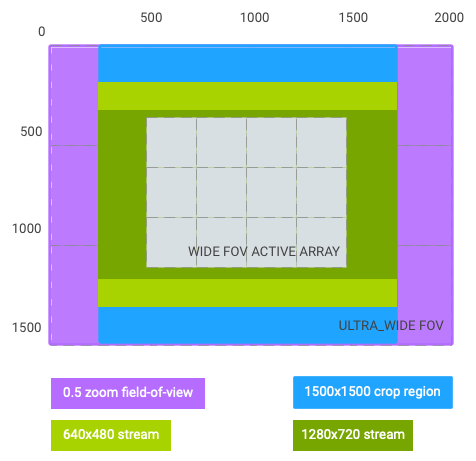
640x480stream source area:(250,(letterboxed)187, 1750, 1312) 1280x720stream source area:(250,(letterboxed)328, 1750, 1172)
As seen from the graphs above,
Using the same hypothetical example above,
- zoomRatio = 2.
0, scaler. cropRegion = (0, 0, 2000, 1500) - zoomRatio = 1.
0 (default), scaler. cropRegion = (500, 375, 1500, 1125)
If the application intends to set aeRegions to be top-left quarter of the viewfinder
field-of-view,
One limitation of controlling zoom using zoomRatio is that the android.
In the capture request,
When the application requests a physical stream for a logical multi-camera,
For all capture request templates,
-
FALSE (v3.2)
AF regions (android.
control. af Regions) have not been set by the camera client. -
TRUE (v3.2)
AF regions (android.
control. af Regions) have been set by the camera client.
Framework-only private key which informs camera fwk that the AF regions has been set
by the client and those regions need not be corrected when android.
3.
This must be set to TRUE by the camera2 java fwk when the camera client sets
android.
-
FALSE (v3.2)
AE regions (android.
control. ae Regions) have not been set by the camera client. -
TRUE (v3.2)
AE regions (android.
control. ae Regions) have been set by the camera client.
Framework-only private key which informs camera fwk that the AE regions has been set
by the client and those regions need not be corrected when android.
3.
This must be set to TRUE by the camera2 java fwk when the camera client sets
android.
-
FALSE (v3.2)
AWB regions (android.
control. awb Regions) have not been set by the camera client. -
TRUE (v3.2)
AWB regions (android.
control. awb Regions) have been set by the camera client.
Framework-only private key which informs camera fwk that the AF regions has been set
by the client and those regions need not be corrected when android.
3.
This must be set to TRUE by the camera2 java fwk when the camera client sets
android.
List of auto-exposure antibanding modes for android.
Any value listed in android.
3.
Not all of the auto-exposure anti-banding modes may be
supported by a given camera device.
List of auto-exposure modes for android.
Any value listed in android.
3.
Not all the auto-exposure modes may be supported by a
given camera device,
All camera devices support ON,
FULL mode camera devices always support OFF mode,
LEGACY mode camera devices never support OFF mode.
List of frame rate ranges for android.
3.
For devices at the LEGACY level or above:
-
For constant-framerate recording,
for each normal CamcorderProfile, that is, a CamcorderProfile that has quality in the range [QUALITY_ LOW, QUALITY_ 2160P], if the profile is supported by the device and has videoFrameRate x,this list will always include ( x,x). -
Also,
a camera device must either not support any CamcorderProfile, or support at least one normal CamcorderProfile that has videoFrameRate x>= 24.
For devices at the LIMITED level or above:
- For devices that advertise NIR color filter arrangement in
android.
sensor. info. color Filter Arrangement, this list will always include ( max,max) wheremax= the maximum output frame rate of the maximum YUV_420_ 888 output size. - For devices advertising any color filter arrangement other than NIR,
or devices not advertising color filter arrangement, this list will always include ( min,max) and (max,max) wheremin<= 15 andmax= the maximum output frame rate of the maximum YUV_420_ 888 output size.
Maximum and minimum exposure compensation values for
android.
Range [0,
For LIMITED and FULL devices,range != [0,):
Min.
Max.
LEGACY devices may support a smaller range than this.
3.
Smallest step by which the exposure compensation
can be changed.
3.
This is the unit for android.1/,-2 for android.
One unit of EV compensation changes the brightness of the captured image by a factor
of two.
This must be less than or equal to 1/
List of auto-focus (AF) modes for android.
Any value listed in android.
3.
Not all the auto-focus modes may be supported by a
given camera device.
All LIMITED and FULL mode camera devices will support OFF mode,android.) will support AUTO mode.
LEGACY devices will support OFF mode only if they support
focusing to infinity (by also setting android.0.).
List of color effects for android.
Any value listed in android.
3.
This list contains the color effect modes that can be applied to
images produced by the camera device.
A color effect will only be applied if
android.
This control has no effect on the operation of other control routines such
as auto-exposure,
List of scene modes for android.
Any value listed in android.
3.
This list contains scene modes that can be set for the camera device.
If no scene modes are supported by the camera device,
FACE_android.).
List of video stabilization modes for android.
Any value listed in android.
3.
OFF will always be listed.
List of auto-white-balance modes for android.
Any value listed in android.
3.
Not all the auto-white-balance modes may be supported by a
given camera device.
All camera devices will support ON mode.
Camera devices that support the MANUAL_
List of the maximum number of regions that can be used for metering in
auto-exposure (AE),
Value must be >= 0 for each element.(AE,.
3.
The maximum number of metering regions that can be used by the auto-exposure (AE)
routine.
Value will be >= 0.
3.
This corresponds to the maximum allowed number of elements in
android.
This entry is private to the framework.
The maximum number of metering regions that can be used by the auto-white balance (AWB)
routine.
Value will be >= 0.
3.
This corresponds to the maximum allowed number of elements in
android.
This entry is private to the framework.
The maximum number of metering regions that can be used by the auto-focus (AF) routine.
Value will be >= 0.
3.
This corresponds to the maximum allowed number of elements in
android.
This entry is private to the framework.
Ordered list of auto-exposure,
For each available scene mode,(aeMode,
where aeMode has the lowest index position.
3.
When a scene mode is enabled,
The order of this list matches that of availableSceneModes,
For example,(FACE_,(0,.
To maintain backward compatibility,
List of available high speed video size,
For each configuration,
3.
When CONSTRAINED_
For the high speed video use case,
The min and max fps will be multiple times of 30fps.
High speed video streaming extends significant performance pressure to camera hardware,
- Each max batch size will be a divisor of its corresponding fps_
max / 30. For example, if max_ fps is 300, max batch size will only be 1, 2, 5, or 10. - The camera device may choose smaller internal batch size for each configuration,
but the actual batch size will be a divisor of max batch size. For example, if the max batch size is 8, the actual batch size used by camera device will only be 1, 2, 4, or 8. - The max batch size in each configuration entry must be no larger than 32.
The camera device doesn't have to support batch mode to achieve high speed video recording,
This fps ranges in this configuration list can only be used to create requests
that are submitted to a high speed camera capture session created by
CameraDevice#createConstrainedHighSpeedCaptureSession.
All the sizes listed in this configuration will be a subset of the sizes reported by
android.
The HAL may support multiple sensor modes for high speed outputs,
HAL can also support 60fps preview during high speed recording session by advertising
[60,
- FALSE (v3.2)
- TRUE (v3.2)
Whether the camera device supports android.
3.
Devices with MANUAL_true.
- FALSE (v3.2)
- TRUE (v3.2)
Whether the camera device supports android.
3.
Devices with MANUAL_true.
List of control modes for android.
Any value listed in android.
3.
This list contains control modes that can be set for the camera device.
Range of boosts for android.
3.
Devices support post RAW sensitivity boost will advertise
android.
This key will be null for devices that do not support any RAW format
outputs.(100, in this key.
This key is added in legacy HAL3.(100, if device supports any of RAW output
formats.
The list of extended scene modes for android.
3.
For DISABLED mode,
For BOKEH_
For BOKEH_
For available extended scene modes,
HAL must support at list one non-OFF extended scene mode if extendedSceneMode control is
available on the camera device.
The ranges of supported zoom ratio for non-DISABLED android.
3.
When extended scene mode is set,
Range [1.
The list of extended scene modes for android.
3.
For DISABLED mode,
For BOKEH_
For BOKEH_
When extended scene mode is set,
Minimum and maximum zoom ratios supported by this camera device.
maxZoom >= 1.
3.
If the camera device supports zoom-out from 1x zoom,
When the key is reported,
For a logical multi-camera device,
When the key is not reported,
List of available high speed video size,
For each configuration,
3.
Analogous to android.
Refer to hal details for android.
The ID sent with the latest
CAMERA2_
Deprecated. Do not use.
3.
Must be 0 if no
CAMERA2_
-
OFF (v3.2)
The camera device will not adjust exposure duration to avoid banding problems.
-
50HZ (v3.2)
The camera device will adjust exposure duration to avoid banding problems with 50Hz illumination sources.
-
60HZ (v3.2)
The camera device will adjust exposure duration to avoid banding problems with 60Hz illumination sources.
-
AUTO (v3.2)
The camera device will automatically adapt its antibanding routine to the current illumination condition.
This is the default mode if AUTO is available on given camera device.
The desired setting for the camera device's auto-exposure
algorithm's antibanding compensation.
3.
Some kinds of lighting fixtures,
Therefore,
A given camera device may not support all of the possible
options for the antibanding mode.
AUTO mode is the default if it is available on given
camera device.
If manual exposure control is enabled (by setting
android.
For all capture request templates,
If manual exposure control is enabled (by setting
android.
Adjustment to auto-exposure (AE) target image
brightness.
3.
The adjustment is measured as a count of steps,
For example,!= OFF.== true.
In the event of exposure compensation value being changed,
-
OFF (v3.2)
Auto-exposure lock is disabled; the AE algorithm is free to update its parameters.
-
ON (v3.2)
Auto-exposure lock is enabled; the AE algorithm must not update the exposure and sensitivity parameters while the lock is active.
android.
control. ae Exposure Compensation setting changes will still take effect while auto-exposure is locked. Some rare LEGACY devices may not support this,
in which case the value will always be overridden to OFF.
Whether auto-exposure (AE) is currently locked to its latest
calculated values.
3.
When set to true (ON),false (OFF).
Note that even when AE is locked,
When android.
If AE precapture is triggered (see android.
When an AE precapture sequence is triggered,false.
Since the camera device has a pipeline of in-flight requests,
- Starting in auto-AE mode:
- Lock AE
- Wait for the first result to be output that has the AE locked
- Copy exposure settings from that result into a request,
set the request to manual AE - Submit the capture request,
proceed to run manual AE as desired.
See android.
-
OFF (v3.2)
The camera device's autoexposure routine is disabled.
The application-selected android.
sensor. exposure Time, android. sensor. sensitivity and android. sensor. frame Duration are used by the camera device, along with android. flash. * fields, if there's a flash unit for this camera device. Note that auto-white balance (AWB) and auto-focus (AF) behavior is device dependent when AE is in OFF mode.
To have consistent behavior across different devices, it is recommended to either set AWB and AF to OFF mode or lock AWB and AF before setting AE to OFF. See android. control. awb Mode, android. control. af Mode, android. control. awb Lock, and android. control. af Trigger for more details. LEGACY devices do not support the OFF mode and will override attempts to use this value to ON.
-
ON (v3.2)
The camera device's autoexposure routine is active,
with no flash control. The application's values for android.
sensor. exposure Time, android. sensor. sensitivity, and android. sensor. frame Duration are ignored. The application has control over the various android. flash. * fields. -
ON_AUTO_FLASH (v3.2)
Like ON,
except that the camera device also controls the camera's flash unit, firing it in low-light conditions. The flash may be fired during a precapture sequence (triggered by android.
control. ae Precapture Trigger) and may be fired for captures for which the android. control. capture Intent field is set to STILL_ CAPTURE -
ON_ALWAYS_FLASH (v3.2)
Like ON,
except that the camera device also controls the camera's flash unit, always firing it for still captures. The flash may be fired during a precapture sequence (triggered by android.
control. ae Precapture Trigger) and will always be fired for captures for which the android. control. capture Intent field is set to STILL_ CAPTURE -
ON_AUTO_FLASH_REDEYE (v3.2)
Like ON_
AUTO_ FLASH, but with automatic red eye reduction. If deemed necessary by the camera device,
a red eye reduction flash will fire during the precapture sequence. -
ON_EXTERNAL_FLASH (v3.3)
An external flash has been turned on.
It informs the camera device that an external flash has been turned on,
and that metering (and continuous focus if active) should be quickly recaculated to account for the external flash. Otherwise, this mode acts like ON. When the external flash is turned off,
AE mode should be changed to one of the other available AE modes. If the camera device supports AE external flash mode,
android. control. ae State must be FLASH_ REQUIRED after the camera device finishes AE scan and it's too dark without flash.
The desired mode for the camera device's
auto-exposure routine.
3.
This control is only effective if android.
When set to any of the ON modes,
The FLASH modes are only available if the camera device
has a flash unit (android.true).
If flash TORCH mode is desired,
When set to any of the ON modes,
List of metering areas to use for auto-exposure adjustment.
Coordinates must be between [(0, of
android.
3.
Not available if android.
The maximum number of regions supported by the device is determined by the value
of android.
For devices not supporting android.
For devices supporting android.(0, being the top-left pixel of the pre-correction active array,(0, being the top-left pixel of the active array,
The weight must be within [0,,
The weights are relative to weights of other exposure metering regions,
If all regions have 0 weight,
If the metering region is outside the used android.
When setting the AE metering regions,
Starting from API level 30,
For camera devices with the
Camera
The HAL level representation of MeteringRectangle[] is a
int[5 * area_
Range over which the auto-exposure routine can
adjust the capture frame rate to maintain good
exposure.
Any of the entries in android.
3.
Only constrains auto-exposure (AE) algorithm,
-
IDLE (v3.2)
The trigger is idle.
-
START (v3.2)
The precapture metering sequence will be started by the camera device.
The exact effect of the precapture trigger depends on the current AE mode and state.
-
CANCEL (v3.2)
The camera device will cancel any currently active or completed precapture metering sequence,
the auto-exposure routine will return to its initial state.
Whether the camera device will trigger a precapture
metering sequence when it processes this request.
3.
This entry is normally set to IDLE,
When set to CANCEL,
The precapture sequence should be triggered before starting a
high-quality still capture for final metering decisions to
be made,
Normally,
When a precapture metering sequence is finished,android.).android.,android.,
The exact effect of auto-exposure (AE) precapture trigger
depends on the current AE mode and state; see
android.
On LEGACY-level devices,
Using the precapture trigger and the auto-focus trigger android.
If both the precapture and the auto-focus trigger are activated on the same request,
The HAL must support triggering the AE precapture trigger while an AF trigger is active
(and vice versa),
-
INACTIVE (v3.2)
AE is off or recently reset.
When a camera device is opened,
it starts in this state. This is a transient state, the camera device may skip reporting this state in capture result. -
SEARCHING (v3.2)
AE doesn't yet have a good set of control values for the current scene.
This is a transient state,
the camera device may skip reporting this state in capture result. -
CONVERGED (v3.2)
AE has a good set of control values for the current scene.
-
LOCKED (v3.2)
AE has been locked.
-
FLASH_REQUIRED (v3.2)
AE has a good set of control values,
but flash needs to be fired for good quality still capture. -
PRECAPTURE (v3.2)
AE has been asked to do a precapture sequence and is currently executing it.
Precapture can be triggered through setting android.
control. ae Precapture Trigger to START. Currently active and completed (if it causes camera device internal AE lock) precapture metering sequence can be canceled through setting android. control. ae Precapture Trigger to CANCEL. Once PRECAPTURE completes,
AE will transition to CONVERGED or FLASH_ REQUIRED as appropriate. This is a transient state, the camera device may skip reporting this state in capture result.
Current state of the auto-exposure (AE) algorithm.
3.
Switching between or enabling AE modes (android.android. resets all
the algorithm states to INACTIVE.
The camera device can do several state transitions between two results,
The state in the result is the state for this image (in sync with this image): if
AE state becomes CONVERGED,
Below are state transition tables for different AE modes.
| State | Transition Cause | New State | Notes |
|---|---|---|---|
| INACTIVE | INACTIVE | Camera device auto exposure algorithm is disabled |
When android.
| State | Transition Cause | New State | Notes |
|---|---|---|---|
| INACTIVE | Camera device initiates AE scan | SEARCHING | Values changing |
| INACTIVE | android. |
LOCKED | Values locked |
| SEARCHING | Camera device finishes AE scan | CONVERGED | Good values, |
| SEARCHING | Camera device finishes AE scan | FLASH_ |
Converged but too dark w/ |
| SEARCHING | android. |
LOCKED | Values locked |
| CONVERGED | Camera device initiates AE scan | SEARCHING | Values changing |
| CONVERGED | android. |
LOCKED | Values locked |
| FLASH_ |
Camera device initiates AE scan | SEARCHING | Values changing |
| FLASH_ |
android. |
LOCKED | Values locked |
| LOCKED | android. |
SEARCHING | Values not good after unlock |
| LOCKED | android. |
CONVERGED | Values good after unlock |
| LOCKED | android. |
FLASH_ |
Exposure good, |
| PRECAPTURE | Sequence done. |
CONVERGED | Ready for high-quality capture |
| PRECAPTURE | Sequence done. |
LOCKED | Ready for high-quality capture |
| LOCKED | aeLock is ON and aePrecaptureTrigger is START | LOCKED | Precapture trigger is ignored when AE is already locked |
| LOCKED | aeLock is ON and aePrecaptureTrigger is CANCEL | LOCKED | Precapture trigger is ignored when AE is already locked |
| Any state (excluding LOCKED) | android. |
PRECAPTURE | Start AE precapture metering sequence |
| Any state (excluding LOCKED) | android. |
INACTIVE | Currently active precapture metering sequence is canceled |
If the camera device supports AE external flash mode (ON_
For the above table,
For example,
| State | Transition Cause | New State | Notes |
|---|---|---|---|
| INACTIVE | Camera device finished AE scan | CONVERGED | Values are already good, |
| Any state (excluding LOCKED) | android. |
FLASH_ |
Converged but too dark w/ |
| Any state (excluding LOCKED) | android. |
CONVERGED | Converged after a precapture sequence, |
| Any state (excluding LOCKED) | android. |
FLASH_ |
Converged but too dark w/ |
| Any state (excluding LOCKED) | android. |
CONVERGED | Converged after a precapture sequences canceled, |
| CONVERGED | Camera device finished AE scan | FLASH_ |
Converged but too dark w/ |
| FLASH_ |
Camera device finished AE scan | CONVERGED | Converged after a new scan, |
-
OFF (v3.2)
The auto-focus routine does not control the lens; android.
lens. focus Distance is controlled by the application. -
AUTO (v3.2)
Basic automatic focus mode.
In this mode,
the lens does not move unless the autofocus trigger action is called. When that trigger is activated, AF will transition to ACTIVE_ SCAN, then to the outcome of the scan (FOCUSED or NOT_ FOCUSED). Always supported if lens is not fixed focus.
Use android.
lens. info. minimum Focus Distance to determine if lens is fixed-focus. Triggering AF_
CANCEL resets the lens position to default, and sets the AF state to INACTIVE. -
MACRO (v3.2)
Close-up focusing mode.
In this mode,
the lens does not move unless the autofocus trigger action is called. When that trigger is activated, AF will transition to ACTIVE_ SCAN, then to the outcome of the scan (FOCUSED or NOT_ FOCUSED). This mode is optimized for focusing on objects very close to the camera. When that trigger is activated,
AF will transition to ACTIVE_ SCAN, then to the outcome of the scan (FOCUSED or NOT_ FOCUSED). Triggering cancel AF resets the lens position to default, and sets the AF state to INACTIVE. -
CONTINUOUS_VIDEO (v3.2)
In this mode,
the AF algorithm modifies the lens position continually to attempt to provide a constantly-in-focus image stream. The focusing behavior should be suitable for good quality video recording; typically this means slower focus movement and no overshoots.
When the AF trigger is not involved, the AF algorithm should start in INACTIVE state, and then transition into PASSIVE_ SCAN and PASSIVE_ FOCUSED states as appropriate. When the AF trigger is activated, the algorithm should immediately transition into AF_ FOCUSED or AF_ NOT_ FOCUSED as appropriate, and lock the lens position until a cancel AF trigger is received. Once cancel is received,
the algorithm should transition back to INACTIVE and resume passive scan. Note that this behavior is not identical to CONTINUOUS_ PICTURE, since an ongoing PASSIVE_ SCAN must immediately be canceled. -
CONTINUOUS_PICTURE (v3.2)
In this mode,
the AF algorithm modifies the lens position continually to attempt to provide a constantly-in-focus image stream. The focusing behavior should be suitable for still image capture; typically this means focusing as fast as possible.
When the AF trigger is not involved, the AF algorithm should start in INACTIVE state, and then transition into PASSIVE_ SCAN and PASSIVE_ FOCUSED states as appropriate as it attempts to maintain focus. When the AF trigger is activated, the algorithm should finish its PASSIVE_ SCAN if active, and then transition into AF_ FOCUSED or AF_ NOT_ FOCUSED as appropriate, and lock the lens position until a cancel AF trigger is received. When the AF cancel trigger is activated,
the algorithm should transition back to INACTIVE and then act as if it has just been started. -
EDOF (v3.2)
Extended depth of field (digital focus) mode.
The camera device will produce images with an extended depth of field automatically; no special focusing operations need to be done before taking a picture.
AF triggers are ignored,
and the AF state will always be INACTIVE.
Whether auto-focus (AF) is currently enabled,
3.
Only effective if android.android.).
If the lens is controlled by the camera device auto-focus algorithm,
When afMode is AUTO or MACRO,== START).
When afMode is one of the continuous auto focus modes,
When afMode is OFF,
To put this in concrete terms,
List of metering areas to use for auto-focus.
Coordinates must be between [(0, of
android.
3.
Not available if android.
The maximum number of focus areas supported by the device is determined by the value
of android.
For devices not supporting android.
For devices supporting android.(0, being the top-left pixel of the pre-correction active array,(0, being the top-left pixel of the active array,
The weight must be within [0,,
The weights are relative to weights of other metering regions,
If all regions have 0 weight,
If the metering region is outside the used android.
When setting the AF metering regions,
Starting from API level 30,
For camera devices with the
Camera
The HAL level representation of MeteringRectangle[] is a
int[5 * area_
-
IDLE (v3.2)
The trigger is idle.
-
START (v3.2)
Autofocus will trigger now.
-
CANCEL (v3.2)
Autofocus will return to its initial state,
and cancel any currently active trigger.
Whether the camera device will trigger autofocus for this request.
3.
This entry is normally set to IDLE,
When included and set to START,
When set to CANCEL,
Generally,
See android.
Using the autofocus trigger and the precapture trigger android.
The HAL must support triggering the AF trigger while an AE precapture trigger is active
(and vice versa),
-
INACTIVE (v3.2)
AF is off or has not yet tried to scan/
been asked to scan. When a camera device is opened,
it starts in this state. This is a transient state, the camera device may skip reporting this state in capture result. -
PASSIVE_SCAN (v3.2)
AF is currently performing an AF scan initiated the camera device in a continuous autofocus mode.
Only used by CONTINUOUS_
* AF modes. This is a transient state, the camera device may skip reporting this state in capture result. -
PASSIVE_FOCUSED (v3.2)
AF currently believes it is in focus,
but may restart scanning at any time. Only used by CONTINUOUS_
* AF modes. This is a transient state, the camera device may skip reporting this state in capture result. -
ACTIVE_SCAN (v3.2)
AF is performing an AF scan because it was triggered by AF trigger.
Only used by AUTO or MACRO AF modes.
This is a transient state, the camera device may skip reporting this state in capture result. -
FOCUSED_LOCKED (v3.2)
AF believes it is focused correctly and has locked focus.
This state is reached only after an explicit START AF trigger has been sent (android.
control. af Trigger), when good focus has been obtained. The lens will remain stationary until the AF mode (android.
control. af Mode) is changed or a new AF trigger is sent to the camera device (android. control. af Trigger). -
NOT_FOCUSED_LOCKED (v3.2)
AF has failed to focus successfully and has locked focus.
This state is reached only after an explicit START AF trigger has been sent (android.
control. af Trigger), when good focus cannot be obtained. The lens will remain stationary until the AF mode (android.
control. af Mode) is changed or a new AF trigger is sent to the camera device (android. control. af Trigger). -
PASSIVE_UNFOCUSED (v3.2)
AF finished a passive scan without finding focus,
and may restart scanning at any time. Only used by CONTINUOUS_
* AF modes. This is a transient state, the camera device may skip reporting this state in capture result. LEGACY camera devices do not support this state.
When a passive scan has finished, it will always go to PASSIVE_ FOCUSED.
Current state of auto-focus (AF) algorithm.
3.
Switching between or enabling AF modes (android.android. resets all
the algorithm states to INACTIVE.
The camera device can do several state transitions between two results,
The state in the result is the state for this image (in sync with this image): if
AF state becomes FOCUSED,
Below are state transition tables for different AF modes.
When android.
| State | Transition Cause | New State | Notes |
|---|---|---|---|
| INACTIVE | INACTIVE | Never changes |
When android.
| State | Transition Cause | New State | Notes |
|---|---|---|---|
| INACTIVE | AF_ |
ACTIVE_ |
Start AF sweep, |
| ACTIVE_ |
AF sweep done | FOCUSED_ |
Focused, |
| ACTIVE_ |
AF sweep done | NOT_ |
Not focused, |
| ACTIVE_ |
AF_ |
INACTIVE | Cancel/ |
| FOCUSED_ |
AF_ |
INACTIVE | Cancel/ |
| FOCUSED_ |
AF_ |
ACTIVE_ |
Start new sweep, |
| NOT_ |
AF_ |
INACTIVE | Cancel/ |
| NOT_ |
AF_ |
ACTIVE_ |
Start new sweep, |
| Any state | Mode change | INACTIVE |
For the above table,
For example,
| State | Transition Cause | New State | Notes |
|---|---|---|---|
| INACTIVE | AF_ |
FOCUSED_ |
Focus is already good or good after a scan, |
| INACTIVE | AF_ |
NOT_ |
Focus failed after a scan, |
| FOCUSED_ |
AF_ |
FOCUSED_ |
Focus is already good or good after a scan, |
| NOT_ |
AF_ |
FOCUSED_ |
Focus is good after a scan, |
When android.
| State | Transition Cause | New State | Notes |
|---|---|---|---|
| INACTIVE | Camera device initiates new scan | PASSIVE_ |
Start AF scan, |
| INACTIVE | AF_ |
NOT_ |
AF state query, |
| PASSIVE_ |
Camera device completes current scan | PASSIVE_ |
End AF scan, |
| PASSIVE_ |
Camera device fails current scan | PASSIVE_ |
End AF scan, |
| PASSIVE_ |
AF_ |
FOCUSED_ |
Immediate transition, |
| PASSIVE_ |
AF_ |
NOT_ |
Immediate transition, |
| PASSIVE_ |
AF_ |
INACTIVE | Reset lens position, |
| PASSIVE_ |
Camera device initiates new scan | PASSIVE_ |
Start AF scan, |
| PASSIVE_ |
Camera device initiates new scan | PASSIVE_ |
Start AF scan, |
| PASSIVE_ |
AF_ |
FOCUSED_ |
Immediate transition, |
| PASSIVE_ |
AF_ |
NOT_ |
Immediate transition, |
| FOCUSED_ |
AF_ |
FOCUSED_ |
No effect |
| FOCUSED_ |
AF_ |
INACTIVE | Restart AF scan |
| NOT_ |
AF_ |
NOT_ |
No effect |
| NOT_ |
AF_ |
INACTIVE | Restart AF scan |
When android.
| State | Transition Cause | New State | Notes |
|---|---|---|---|
| INACTIVE | Camera device initiates new scan | PASSIVE_ |
Start AF scan, |
| INACTIVE | AF_ |
NOT_ |
AF state query, |
| PASSIVE_ |
Camera device completes current scan | PASSIVE_ |
End AF scan, |
| PASSIVE_ |
Camera device fails current scan | PASSIVE_ |
End AF scan, |
| PASSIVE_ |
AF_ |
FOCUSED_ |
Eventual transition once the focus is good. |
| PASSIVE_ |
AF_ |
NOT_ |
Eventual transition if cannot find focus. |
| PASSIVE_ |
AF_ |
INACTIVE | Reset lens position, |
| PASSIVE_ |
Camera device initiates new scan | PASSIVE_ |
Start AF scan, |
| PASSIVE_ |
Camera device initiates new scan | PASSIVE_ |
Start AF scan, |
| PASSIVE_ |
AF_ |
FOCUSED_ |
Immediate trans. |
| PASSIVE_ |
AF_ |
NOT_ |
Immediate trans. |
| FOCUSED_ |
AF_ |
FOCUSED_ |
No effect |
| FOCUSED_ |
AF_ |
INACTIVE | Restart AF scan |
| NOT_ |
AF_ |
NOT_ |
No effect |
| NOT_ |
AF_ |
INACTIVE | Restart AF scan |
When switch between AF_
| State | Transition Cause | New State | Notes |
|---|---|---|---|
| any state | CAF-->AUTO mode switch | INACTIVE | Mode switch without trigger, |
| any state | CAF-->AUTO mode switch with AF_ |
trigger-reachable states from INACTIVE | Mode switch with trigger, |
| any state | AUTO-->CAF mode switch | passively reachable states from INACTIVE | Mode switch without trigger, |
The ID sent with the latest
CAMERA2_
Deprecated. Do not use.
3.
Must be 0 if no CAMERA2_
-
OFF (v3.2)
Auto-white balance lock is disabled; the AWB algorithm is free to update its parameters if in AUTO mode.
-
ON (v3.2)
Auto-white balance lock is enabled; the AWB algorithm will not update its parameters while the lock is active.
Whether auto-white balance (AWB) is currently locked to its
latest calculated values.
3.
When set to true (ON),false (OFF).
Since the camera device has a pipeline of in-flight requests,
- Starting in auto-AWB mode:
- Lock AWB
- Wait for the first result to be output that has the AWB locked
- Copy AWB settings from that result into a request,
set the request to manual AWB - Submit the capture request,
proceed to run manual AWB as desired.
Note that AWB lock is only meaningful when
android.
Some LEGACY devices may not support ON; the value is then overridden to OFF.
-
OFF (v3.2)
The camera device's auto-white balance routine is disabled.
The application-selected color transform matrix (android.
color Correction. transform) and gains (android. color Correction. gains) are used by the camera device for manual white balance control. -
AUTO (v3.2)
The camera device's auto-white balance routine is active.
The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
INCANDESCENT (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses incandescent light as the assumed scene illumination for white balance.
While the exact white balance transforms are up to the camera device,
they will approximately match the CIE standard illuminant A. The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
FLUORESCENT (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses fluorescent light as the assumed scene illumination for white balance.
While the exact white balance transforms are up to the camera device,
they will approximately match the CIE standard illuminant F2. The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
WARM_FLUORESCENT (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses warm fluorescent light as the assumed scene illumination for white balance.
While the exact white balance transforms are up to the camera device,
they will approximately match the CIE standard illuminant F4. The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
DAYLIGHT (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses daylight light as the assumed scene illumination for white balance.
While the exact white balance transforms are up to the camera device,
they will approximately match the CIE standard illuminant D65. The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
CLOUDY_DAYLIGHT (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses cloudy daylight light as the assumed scene illumination for white balance.
The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
TWILIGHT (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses twilight light as the assumed scene illumination for white balance.
The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request. -
SHADE (v3.2)
The camera device's auto-white balance routine is disabled; the camera device uses shade light as the assumed scene illumination for white balance.
The application's values for android.
color Correction. transform and android. color Correction. gains are ignored. For devices that support the MANUAL_ POST_ PROCESSING capability, the values used by the camera device for the transform and gains will be available in the capture result for this request.
Whether auto-white balance (AWB) is currently setting the color
transform fields,
3.
This control is only effective if android.
When set to the AUTO mode,
When set to the OFF mode,
When set to any other modes,
List of metering areas to use for auto-white-balance illuminant
estimation.
Coordinates must be between [(0, of
android.
3.
Not available if android.
The maximum number of regions supported by the device is determined by the value
of android.
For devices not supporting android.
For devices supporting android.(0, being the top-left pixel of the pre-correction active array,(0, being the top-left pixel of the active array,
The weight must range from 0 to 1000,
The weights are relative to weights of other white balance metering regions,
If all regions have 0 weight,
If the metering region is outside the used android.
When setting the AWB metering regions,
Starting from API level 30,
For camera devices with the
Camera
The HAL level representation of MeteringRectangle[] is a
int[5 * area_
-
CUSTOM (v3.2)
The goal of this request doesn't fall into the other categories.
The camera device will default to preview-like behavior. -
PREVIEW (v3.2)
This request is for a preview-like use case.
The precapture trigger may be used to start off a metering w/
flash sequence. -
STILL_CAPTURE (v3.2)
This request is for a still capture-type use case.
If the flash unit is under automatic control,
it may fire as needed. -
VIDEO_RECORD (v3.2)
This request is for a video recording use case.
-
VIDEO_SNAPSHOT (v3.2)
This request is for a video snapshot (still image while recording video) use case.
The camera device should take the highest-quality image possible (given the other settings) without disrupting the frame rate of video recording.
-
ZERO_SHUTTER_LAG (v3.2)
This request is for a ZSL usecase; the application will stream full-resolution images and reprocess one or several later for a final capture.
-
MANUAL (v3.2)
This request is for manual capture use case where the applications want to directly control the capture parameters.
For example,
the application may wish to manually control android. sensor. exposure Time, android. sensor. sensitivity, etc. -
MOTION_TRACKING (v3.3)
This request is for a motion tracking use case,
where the application will use camera and inertial sensor data to locate and track objects in the world. The camera device auto-exposure routine will limit the exposure time of the camera to no more than 20 milliseconds,
to minimize motion blur.
Information to the camera device 3A (auto-exposure,
3.
This control (except for MANUAL) is only effective if
android. and any 3A routine is active.
All intents are supported by all devices,
- ZERO_
SHUTTER_ LAG will be supported if android. request. available Capabilities contains PRIVATE_ REPROCESSING or YUV_ REPROCESSING. - MANUAL will be supported if android.
request. available Capabilities contains MANUAL_ SENSOR. - MOTION_
TRACKING will be supported if android. request. available Capabilities contains MOTION_ TRACKING.
-
INACTIVE (v3.2)
AWB is not in auto mode,
or has not yet started metering. When a camera device is opened,
it starts in this state. This is a transient state, the camera device may skip reporting this state in capture result. -
SEARCHING (v3.2)
AWB doesn't yet have a good set of control values for the current scene.
This is a transient state,
the camera device may skip reporting this state in capture result. -
CONVERGED (v3.2)
AWB has a good set of control values for the current scene.
-
LOCKED (v3.2)
AWB has been locked.
Current state of auto-white balance (AWB) algorithm.
3.
Switching between or enabling AWB modes (android.android. resets all
the algorithm states to INACTIVE.
The camera device can do several state transitions between two results,
The state in the result is the state for this image (in sync with this image): if
AWB state becomes CONVERGED,
Below are state transition tables for different AWB modes.
When android.:
| State | Transition Cause | New State | Notes |
|---|---|---|---|
| INACTIVE | INACTIVE | Camera device auto white balance algorithm is disabled |
When android.
| State | Transition Cause | New State | Notes |
|---|---|---|---|
| INACTIVE | Camera device initiates AWB scan | SEARCHING | Values changing |
| INACTIVE | android. |
LOCKED | Values locked |
| SEARCHING | Camera device finishes AWB scan | CONVERGED | Good values, |
| SEARCHING | android. |
LOCKED | Values locked |
| CONVERGED | Camera device initiates AWB scan | SEARCHING | Values changing |
| CONVERGED | android. |
LOCKED | Values locked |
| LOCKED | android. |
SEARCHING | Values not good after unlock |
For the above table,
For example,
| State | Transition Cause | New State | Notes |
|---|---|---|---|
| INACTIVE | Camera device finished AWB scan | CONVERGED | Values are already good, |
| LOCKED | android. |
CONVERGED | Values good after unlock, |
-
OFF (v3.2)
No color effect will be applied.
-
MONO (v3.2)
[optional]
A "monocolor" effect where the image is mapped into a single color.
This will typically be grayscale.
-
NEGATIVE (v3.2)
[optional]
A "photo-negative" effect where the image's colors are inverted.
-
SOLARIZE (v3.2)
[optional]
A "solarisation" effect (Sabattier effect) where the image is wholly or partially reversed in tone.
-
SEPIA (v3.2)
[optional]
A "sepia" effect where the image is mapped into warm gray,
red, and brown tones. -
POSTERIZE (v3.2)
[optional]
A "posterization" effect where the image uses discrete regions of tone rather than a continuous gradient of tones.
-
WHITEBOARD (v3.2)
[optional]
A "whiteboard" effect where the image is typically displayed as regions of white,
with black or grey details. -
BLACKBOARD (v3.2)
[optional]
A "blackboard" effect where the image is typically displayed as regions of black,
with white or grey details. -
AQUA (v3.2)
[optional]
An "aqua" effect where a blue hue is added to the image.
A special color effect to apply.
3.
When this mode is set,
-
OFF (v3.2)
Full application control of pipeline.
All control by the device's metering and focusing (3A) routines is disabled,
and no other settings in android. control. * have any effect, except that android. control. capture Intent may be used by the camera device to select post-processing values for processing blocks that do not allow for manual control, or are not exposed by the camera API. However,
the camera device's 3A routines may continue to collect statistics and update their internal state so that when control is switched to AUTO mode, good control values can be immediately applied. -
AUTO (v3.2)
Use settings for each individual 3A routine.
Manual control of capture parameters is disabled.
All controls in android. control. * besides sceneMode take effect. -
USE_SCENE_MODE (v3.2)
[optional]
Use a specific scene mode.
Enabling this disables control.
aeMode, control. awbMode and control. afMode controls; the camera device will ignore those settings while USE_ SCENE_ MODE is active (except for FACE_ PRIORITY scene mode). Other control entries are still active. This setting can only be used if scene mode is supported (i. e. android. control. available Scene Modes contain some modes other than DISABLED). For extended scene modes such as BOKEH,
please use USE_ EXTENDED_ SCENE_ MODE instead. -
OFF_KEEP_STATE (v3.2)
[optional]
Same as OFF mode,
except that this capture will not be used by camera device background auto-exposure, auto-white balance and auto-focus algorithms (3A) to update their statistics. Specifically,
the 3A routines are locked to the last values set from a request with AUTO, OFF, or USE_ SCENE_ MODE, and any statistics or state updates collected from manual captures with OFF_ KEEP_ STATE will be discarded by the camera device. -
USE_EXTENDED_SCENE_MODE (v3.5)
[optional]
Use a specific extended scene mode.
When extended scene mode is on,
the camera device may override certain control parameters, such as targetFpsRange, AE, AWB, and AF modes, to achieve best power and quality tradeoffs. Only the mandatory stream combinations of LIMITED hardware level are guaranteed. This setting can only be used if extended scene mode is supported (i.
e. android. control. available Extended Scene Modes contains some modes other than DISABLED).
Overall mode of 3A (auto-exposure,
3.
This is a top-level 3A control switch.
When set to AUTO,
When set to USE_
When set to OFF_
-
DISABLED (v3.2)
0
Indicates that no scene modes are set for a given capture request.
-
FACE_PRIORITY (v3.2)
If face detection support exists,
use face detection data for auto-focus, auto-white balance, and auto-exposure routines. If face detection statistics are disabled (i.
e. android. statistics. face Detect Mode is set to OFF), this should still operate correctly (but will not return face detection statistics to the framework). Unlike the other scene modes,
android. control. ae Mode, android. control. awb Mode, and android. control. af Mode remain active when FACE_ PRIORITY is set. -
ACTION (v3.2)
[optional]
Optimized for photos of quickly moving objects.
Similar to SPORTS.
-
PORTRAIT (v3.2)
[optional]
Optimized for still photos of people.
-
LANDSCAPE (v3.2)
[optional]
Optimized for photos of distant macroscopic objects.
-
NIGHT (v3.2)
[optional]
Optimized for low-light settings.
-
NIGHT_PORTRAIT (v3.2)
[optional]
Optimized for still photos of people in low-light settings.
-
THEATRE (v3.2)
[optional]
Optimized for dim,
indoor settings where flash must remain off. -
BEACH (v3.2)
[optional]
Optimized for bright,
outdoor beach settings. -
SNOW (v3.2)
[optional]
Optimized for bright,
outdoor settings containing snow. -
SUNSET (v3.2)
[optional]
Optimized for scenes of the setting sun.
-
STEADYPHOTO (v3.2)
[optional]
Optimized to avoid blurry photos due to small amounts of device motion (for example: due to hand shake).
-
FIREWORKS (v3.2)
[optional]
Optimized for nighttime photos of fireworks.
-
SPORTS (v3.2)
[optional]
Optimized for photos of quickly moving people.
Similar to ACTION.
-
PARTY (v3.2)
[optional]
Optimized for dim,
indoor settings with multiple moving people. -
CANDLELIGHT (v3.2)
[optional]
Optimized for dim settings where the main light source is a candle.
-
BARCODE (v3.2)
[optional]
Optimized for accurately capturing a photo of barcode for use by camera applications that wish to read the barcode value.
-
HIGH_SPEED_VIDEO (v3.2)
[deprecated]
[optional]
[java_public]
This is deprecated,
please use CameraDevice#createConstrainedHighSpeedCaptureSession and CameraConstrainedHighSpeedCaptureSession#createHighSpeedRequestList for high speed video recording. Optimized for high speed video recording (frame rate >=60fps) use case.
The supported high speed video sizes and fps ranges are specified in android.
control. available High Speed Video Configurations. To get desired output frame rates, the application is only allowed to select video size and fps range combinations listed in this static metadata. The fps range can be control via android. control. ae Target Fps Range. In this mode,
the camera device will override aeMode, awbMode, and afMode to ON, ON, and CONTINUOUS_ VIDEO, respectively. All post-processing block mode controls will be overridden to be FAST. Therefore, no manual control of capture and post-processing parameters is possible. All other controls operate the same as when android. control. mode == AUTO. This means that all other android. control. * fields continue to work, such as - android.
control. ae Target Fps Range - android.
control. ae Exposure Compensation - android.
control. ae Lock - android.
control. awb Lock - android.
control. effect Mode - android.
control. ae Regions - android.
control. af Regions - android.
control. awb Regions - android.
control. af Trigger - android.
control. ae Precapture Trigger - android.
control. zoom Ratio
Outside of android.
control. *, the following controls will work: - android.
flash. mode (automatic flash for still capture will not work since aeMode is ON) - android.
lens. optical Stabilization Mode (if it is supported) - android.
scaler. crop Region - android.
statistics. face Detect Mode
For high speed recording use case,
the actual maximum supported frame rate may be lower than what camera can output, depending on the destination Surfaces for the image data. For example, if the destination surface is from video encoder, the application need check if the video encoder is capable of supporting the high frame rate for a given video size, or it will end up with lower recording frame rate. If the destination surface is from preview window, the preview frame rate will be bounded by the screen refresh rate. The camera device will only support up to 2 output high speed streams (processed non-stalling format defined in android.
request. max Num Output Streams) in this mode. This control will be effective only if all of below conditions are true: - The application created no more than maxNumHighSpeedStreams processed non-stalling
format output streams,
where maxNumHighSpeedStreams is calculated as min(2, android. request. max Num Output Streams[Processed (but not-stalling)]). - The stream sizes are selected from the sizes reported by
android.
control. available High Speed Video Configurations. - No processed non-stalling or raw streams are configured.
When above conditions are NOT satisfied,
the controls of this mode and android. control. ae Target Fps Range will be ignored by the camera device, the camera device will fall back to android. control. mode ==AUTO,and the returned capture result metadata will give the fps range chosen by the camera device. Switching into or out of this mode may trigger some camera ISP/
sensor reconfigurations, which may introduce extra latency. It is recommended that the application avoids unnecessary scene mode switch as much as possible. - android.
-
HDR (v3.2)
[optional]
Turn on a device-specific high dynamic range (HDR) mode.
In this scene mode,
the camera device captures images that keep a larger range of scene illumination levels visible in the final image. For example, when taking a picture of a object in front of a bright window, both the object and the scene through the window may be visible when using HDR mode, while in normal AUTO mode, one or the other may be poorly exposed. As a tradeoff, HDR mode generally takes much longer to capture a single image, has no user control, and may have other artifacts depending on the HDR method used. Therefore,
HDR captures operate at a much slower rate than regular captures. In this mode,
on LIMITED or FULL devices, when a request is made with a android. control. capture Intent of STILL_ CAPTURE, the camera device will capture an image using a high dynamic range capture technique. On LEGACY devices, captures that target a JPEG-format output will be captured with HDR, and the capture intent is not relevant. The HDR capture may involve the device capturing a burst of images internally and combining them into one,
or it may involve the device using specialized high dynamic range capture hardware. In all cases, a single image is produced in response to a capture request submitted while in HDR mode. Since substantial post-processing is generally needed to produce an HDR image,
only YUV, PRIVATE, and JPEG outputs are supported for LIMITED/ FULL device HDR captures, and only JPEG outputs are supported for LEGACY HDR captures. Using a RAW output for HDR capture is not supported. Some devices may also support always-on HDR,
which applies HDR processing at full frame rate. For these devices, intents other than STILL_ CAPTURE will also produce an HDR output with no frame rate impact compared to normal operation, though the quality may be lower than for STILL_ CAPTURE intents. If SCENE_
MODE_ HDR is used with unsupported output types or capture intents, the images captured will be as if the SCENE_ MODE was not enabled at all. -
FACE_PRIORITY_LOW_LIGHT (v3.2)
[optional]
[hidden]
Same as FACE_
PRIORITY scene mode, except that the camera device will choose higher sensitivity values (android. sensor. sensitivity) under low light conditions. The camera device may be tuned to expose the images in a reduced sensitivity range to produce the best quality images.
For example, if the android. sensor. info. sensitivity Range gives range of [100, 1600], the camera device auto-exposure routine tuning process may limit the actual exposure sensitivity range to [100, 1200] to ensure that the noise level isn't excessive in order to preserve the image quality. Under this situation, the image under low light may be under-exposed when the sensor max exposure time (bounded by the android. control. ae Target Fps Range when android. control. ae Mode is one of the ON_ * modes) and effective max sensitivity are reached. This scene mode allows the camera device auto-exposure routine to increase the sensitivity up to the max sensitivity specified by android. sensor. info. sensitivity Range when the scene is too dark and the max exposure time is reached. The captured images may be noisier compared with the images captured in normal FACE_ PRIORITY mode; therefore, it is recommended that the application only use this scene mode when it is capable of reducing the noise level of the captured images. Unlike the other scene modes,
android. control. ae Mode, android. control. awb Mode, and android. control. af Mode remain active when FACE_ PRIORITY_ LOW_ LIGHT is set. -
DEVICE_CUSTOM_START (v3.2)
[optional]
[hidden]
100
Scene mode values within the range of
[DEVICE_are reserved for device specific customized scene modes.CUSTOM_ START, DEVICE_ CUSTOM_ END] -
DEVICE_CUSTOM_END (v3.2)
[optional]
[hidden]
127
Scene mode values within the range of
[DEVICE_are reserved for device specific customized scene modes.CUSTOM_ START, DEVICE_ CUSTOM_ END]
Control for which scene mode is currently active.
3.
Scene modes are custom camera modes optimized for a certain set of conditions and
capture settings.
This is the mode that that is active when
android..
The interpretation and implementation of these scene modes is left
to the implementor of the camera device.
HAL implementations that include scene modes are expected to provide
the per-scene settings to use for android.
For HIGH_
-
OFF (v3.2)
Video stabilization is disabled.
-
ON (v3.2)
Video stabilization is enabled.
-
PREVIEW_STABILIZATION (v3.8)
[optional]
Preview stabilization,
where the preview in addition to all other non-RAW streams are stabilized with the same quality of stabilization, is enabled. This mode aims to give clients a 'what you see is what you get' effect. In this mode, the FoV reduction will be a maximum of 20 % both horizontally and vertically (10% from left, right, top, bottom) for the given zoom ratio / crop region. The resultant FoV will also be the same across all processed streams (that have the same aspect ratio).
Whether video stabilization is
active.
3.
Video stabilization automatically warps images from
the camera in order to stabilize motion between consecutive frames.
If enabled,
Switching between different video stabilization modes may take several
frames to initialize,
In addition,
If a camera device supports both this mode and OIS
(android.
If video stabilization is set to "PREVIEW_
When this key is set to "PREVIEW_
This is in order for look-ahead time period to be short enough
for preview to match video recording for real-time usage.
The amount of additional sensitivity boost applied to output images
after RAW sensor data is captured.
3.
Some camera devices support additional digital sensitivity boosting in the
camera processing pipeline after sensor RAW image is captured.
This key will be null for devices that do not support any RAW format
outputs.100 in this key.
If the camera device cannot apply the exact boost requested,
For devices that support post RAW sensitivity boost,android.
The sensitivity of RAW format images will always be android.
This control is only effective if android.
-
FALSE (v3.2)
Requests with android.
control. capture Intent == STILL_ CAPTURE must be captured after previous requests. -
TRUE (v3.2)
Requests with android.
control. capture Intent == STILL_ CAPTURE may or may not be captured before previous requests.
Allow camera device to enable zero-shutter-lag mode for requests with
android.
3.
If enableZsl is true,
For example,
The output images for request B may have contents captured before the output images for
request A,
Note that when enableZsl is true,
For applications targeting SDK versions O and newer,true.false if present.
For applications targeting SDK versions older than O,false if present.
For application-operated ZSL,
It is valid for HAL to produce regular output images for requests with STILL_
-
NOT_DETECTED (v3.3)
Scene change is not detected within the AF region(s).
-
DETECTED (v3.3)
Scene change is detected within the AF region(s).
Whether a significant scene change is detected within the currently-set AF
region(s).
3.
When the camera focus routine detects a change in the scene it is looking at,
This key will be available if the camera device advertises this key via CameraCharacteristics#getAvailableCaptureResultKeys.
-
DISABLED (v3.5)
0
Extended scene mode is disabled.
-
BOKEH_STILL_CAPTURE (v3.5)
High quality bokeh mode is enabled for all non-raw streams (including YUV,
JPEG, and IMPLEMENTATION_ DEFINED) when capture intent is STILL_ CAPTURE. Due to the extra image processing, this mode may introduce additional stall to non-raw streams. This mode should be used in high quality still capture use case. -
BOKEH_CONTINUOUS (v3.5)
Bokeh effect must not slow down capture rate relative to sensor raw output,
and the effect is applied to all processed streams no larger than the maximum streaming dimension. This mode should be used if performance and power are a priority, such as video recording. -
VENDOR_START (v3.5)
[hidden]
0x40
Vendor defined extended scene modes.
These depend on vendor implementation.
Whether extended scene mode is enabled for a particular capture request.
3.
With bokeh mode,
When set to BOKEH_
When set to BOKEH_
- If the camera device has BURST_
CAPTURE capability, the frame rate requirement of BURST_ CAPTURE must still be met. - All streams not larger than the maximum streaming dimension for BOKEH_
STILL_ CAPTURE mode (queried via Camera Characteristics#CONTROL_ AVAILABLE_ EXTENDED_ SCENE_ MODE_ CAPABILITIES) will have preview bokeh effect applied.
When set to BOKEH_
Switching between different extended scene modes may involve reconfiguration of the camera
pipeline,
For a logical multi-camera,
The desired zoom ratio
3.
Instead of using android.
By using this control,
- Zooming in from a wide-angle lens to a telephoto lens: A floating-point ratio provides
better precision compared to an integer value of android.
scaler. crop Region. - Zooming out from a wide lens to an ultrawide lens: zoomRatio supports zoom-out whereas
android.
scaler. crop Region doesn't.
To illustrate,(2000,.
- Camera Configuration:
- Active array size:
2000x1500(3 MP,4:3 aspect ratio) - Output stream #1:
640x480(VGA,4:3 aspect ratio) - Output stream #2:
1280x720(720p,16:9 aspect ratio)
- Active array size:
- Case #1: 4:3 crop region with 2.
0x zoom ratio - Zoomed field of view: 1/
4 of original field of view - Crop region:
Rect(0,(post zoom)0, 2000, 1500) // (left, top, right, bottom)
- Zoomed field of view: 1/
640x480stream source area:(0,(equal to crop region)0, 2000, 1500) 1280x720stream source area:(0,(letterboxed)187, 2000, 1312)
- Case #2: 16:9 crop region with 2.
0x zoom. - Zoomed field of view: 1/
4 of original field of view - Crop region:
Rect(0,187, 2000, 1312) 640x480stream source area:(250,(pillarboxed)187, 1750, 1312) 1280x720stream source area:(0,(equal to crop region)187, 2000, 1312)
- Zoomed field of view: 1/
- Case #3: 1:1 crop region with 0.
5x zoom out to ultrawide lens. - Zoomed field of view: 4x of original field of view (switched from wide lens to ultrawide lens)
- Crop region:
Rect(250,0, 1750, 1500) 640x480stream source area:(250,(letterboxed)187, 1750, 1312) 1280x720stream source area:(250,(letterboxed)328, 1750, 1172)
As seen from the graphs above,
Using the same hypothetical example above,
- zoomRatio = 2.
0, scaler. cropRegion = (0, 0, 2000, 1500) - zoomRatio = 1.
0 (default), scaler. cropRegion = (500, 375, 1500, 1125)
If the application intends to set aeRegions to be top-left quarter of the viewfinder
field-of-view,
One limitation of controlling zoom using zoomRatio is that the android.
In the capture request,
When the application requests a physical stream for a logical multi-camera,
For all capture request templates,
-
FAST (v3.2)
Minimal or no slowdown of frame rate compared to Bayer RAW output.
-
HIGH_QUALITY (v3.2)
Improved processing quality but the frame rate might be slowed down relative to raw output.
Controls the quality of the demosaicing
processing.
3.
-
OFF (v3.2)
No edge enhancement is applied.
-
FAST (v3.2)
Apply edge enhancement at a quality level that does not slow down frame rate relative to sensor output.
It may be the same as OFF if edge enhancement will slow down frame rate relative to sensor. -
HIGH_QUALITY (v3.2)
Apply high-quality edge enhancement,
at a cost of possibly reduced output frame rate. -
ZERO_SHUTTER_LAG (v3.2)
[optional]
Edge enhancement is applied at different levels for different output streams,
based on resolution. Streams at maximum recording resolution (see CameraDevice#createCaptureSession) or below have edge enhancement applied, while higher-resolution streams have no edge enhancement applied. The level of edge enhancement for low-resolution streams is tuned so that frame rate is not impacted, and the quality is equal to or better than FAST (since it is only applied to lower-resolution outputs, quality may improve from FAST). This mode is intended to be used by applications operating in a zero-shutter-lag mode with YUV or PRIVATE reprocessing,
where the application continuously captures high-resolution intermediate buffers into a circular buffer, from which a final image is produced via reprocessing when a user takes a picture. For such a use case, the high-resolution buffers must not have edge enhancement applied to maximize efficiency of preview and to avoid double-applying enhancement when reprocessed, while low-resolution buffers (used for recording or preview, generally) need edge enhancement applied for reasonable preview quality. This mode is guaranteed to be supported by devices that support either the YUV_
REPROCESSING or PRIVATE_ REPROCESSING capabilities (android. request. available Capabilities lists either of those capabilities) and it will be the default mode for CAMERA3_ TEMPLATE_ ZERO_ SHUTTER_ LAG template.
Operation mode for edge
enhancement.
3.
Edge enhancement improves sharpness and details in the captured image.
FAST/
ZERO_
For YUV_
For YUV_
Control the amount of edge enhancement applied to the images
3.
List of edge enhancement modes for android.
Any value listed in android.
3.
Full-capability camera devices must always support OFF; camera devices that support
YUV_
HAL must support both FAST and HIGH_
-
OFF (v3.2)
No edge enhancement is applied.
-
FAST (v3.2)
Apply edge enhancement at a quality level that does not slow down frame rate relative to sensor output.
It may be the same as OFF if edge enhancement will slow down frame rate relative to sensor. -
HIGH_QUALITY (v3.2)
Apply high-quality edge enhancement,
at a cost of possibly reduced output frame rate. -
ZERO_SHUTTER_LAG (v3.2)
[optional]
Edge enhancement is applied at different levels for different output streams,
based on resolution. Streams at maximum recording resolution (see CameraDevice#createCaptureSession) or below have edge enhancement applied, while higher-resolution streams have no edge enhancement applied. The level of edge enhancement for low-resolution streams is tuned so that frame rate is not impacted, and the quality is equal to or better than FAST (since it is only applied to lower-resolution outputs, quality may improve from FAST). This mode is intended to be used by applications operating in a zero-shutter-lag mode with YUV or PRIVATE reprocessing,
where the application continuously captures high-resolution intermediate buffers into a circular buffer, from which a final image is produced via reprocessing when a user takes a picture. For such a use case, the high-resolution buffers must not have edge enhancement applied to maximize efficiency of preview and to avoid double-applying enhancement when reprocessed, while low-resolution buffers (used for recording or preview, generally) need edge enhancement applied for reasonable preview quality. This mode is guaranteed to be supported by devices that support either the YUV_
REPROCESSING or PRIVATE_ REPROCESSING capabilities (android. request. available Capabilities lists either of those capabilities) and it will be the default mode for CAMERA3_ TEMPLATE_ ZERO_ SHUTTER_ LAG template.
Operation mode for edge
enhancement.
3.
Edge enhancement improves sharpness and details in the captured image.
FAST/
ZERO_
For YUV_
For YUV_
Power for flash firing/
0 - 10
3.
Power for snapshot may use a different scale than
for torch mode.
Firing time of flash relative to start of exposure
0-(exposure time-flash duration)
3.
Clamped to (0,
-
OFF (v3.2)
Do not fire the flash for this capture.
-
SINGLE (v3.2)
If the flash is available and charged,
fire flash for this capture. -
TORCH (v3.2)
Transition flash to continuously on.
The desired mode for for the camera device's flash control.
3.
This control is only effective when flash unit is available
(android.).
When this control is used,
When set to OFF,
When set to SINGLE,
When set to TORCH,
The flash status will be reported by android.
- FALSE (v3.2)
- TRUE (v3.2)
Whether this camera device has a
flash unit.
3.
Will be false if no flash is available.
If there is no flash unit,
Time taken before flash can fire again
0-1e9
3.
1 second too long/
Maximum flashlight brightness level.
3.
If this value is greater than 1,
The maximum value is guaranteed to be safe to use for an indefinite duration in
terms of device flashlight lifespan,
Default flashlight brightness level to be set via
CameraManager#turnOnTorchWithStrengthLevel.
3.
If flash unit is available this will be greater than or equal to 1 and less
or equal to android..
Setting flashlight brightness above the default level
(i.android.) may make the device more
likely to reach thermal throttling conditions and slow down,
The x,
0-1 for both
3.
Max energy output of the flash for a full power single flash
>= 0
3.
Power for flash firing/
0 - 10
3.
Power for snapshot may use a different scale than
for torch mode.
Firing time of flash relative to start of exposure
0-(exposure time-flash duration)
3.
Clamped to (0,
-
OFF (v3.2)
Do not fire the flash for this capture.
-
SINGLE (v3.2)
If the flash is available and charged,
fire flash for this capture. -
TORCH (v3.2)
Transition flash to continuously on.
The desired mode for for the camera device's flash control.
3.
This control is only effective when flash unit is available
(android.).
When this control is used,
When set to OFF,
When set to SINGLE,
When set to TORCH,
The flash status will be reported by android.
-
UNAVAILABLE (v3.2)
No flash on camera.
-
CHARGING (v3.2)
Flash is charging and cannot be fired.
-
READY (v3.2)
Flash is ready to fire.
-
FIRED (v3.2)
Flash fired for this capture.
-
PARTIAL (v3.2)
Flash partially illuminated this frame.
This is usually due to the next or previous frame having the flash fire,
and the flash spilling into this capture due to hardware limitations.
Current state of the flash
unit.
3.
When the camera device doesn't have flash unit
(i.android.),
In certain conditions,
- Flash-less cameras always return UNAVAILABLE.
- Using android.
control. ae Mode ==ON_ALWAYS_ FLASH will always return FIRED. - Using android.
flash. mode ==TORCH will always return FIRED.
In all other conditions the state will not be available on
LEGACY devices (i.null).
-
OFF (v3.2)
No hot pixel correction is applied.
The frame rate must not be reduced relative to sensor raw output for this option.
The hotpixel map may be returned in android.
statistics. hot Pixel Map. -
FAST (v3.2)
Hot pixel correction is applied,
without reducing frame rate relative to sensor raw output. The hotpixel map may be returned in android.
statistics. hot Pixel Map. -
HIGH_QUALITY (v3.2)
High-quality hot pixel correction is applied,
at a cost of possibly reduced frame rate relative to sensor raw output. The hotpixel map may be returned in android.
statistics. hot Pixel Map.
Operational mode for hot pixel correction.
3.
Hotpixel correction interpolates out,
List of hot pixel correction modes for android.
Any value listed in android.
3.
FULL mode camera devices will always support FAST.
To avoid performance issues,
-
OFF (v3.2)
No hot pixel correction is applied.
The frame rate must not be reduced relative to sensor raw output for this option.
The hotpixel map may be returned in android.
statistics. hot Pixel Map. -
FAST (v3.2)
Hot pixel correction is applied,
without reducing frame rate relative to sensor raw output. The hotpixel map may be returned in android.
statistics. hot Pixel Map. -
HIGH_QUALITY (v3.2)
High-quality hot pixel correction is applied,
at a cost of possibly reduced frame rate relative to sensor raw output. The hotpixel map may be returned in android.
statistics. hot Pixel Map.
Operational mode for hot pixel correction.
3.
Hotpixel correction interpolates out,
A location object to use when generating image GPS metadata.
3.
Setting a location object in a request will include the GPS coordinates of the location
into any JPEG images captured based on the request.
This tag is also used for HEIC image capture.
GPS coordinates to include in output JPEG
EXIF.
(-180 - 180],
3.
This tag is also used for HEIC image capture.
32 characters describing GPS algorithm to
include in EXIF.
3.
This tag is also used for HEIC image capture.
Time GPS fix was made to include in
EXIF.
3.
This tag is also used for HEIC image capture.
The orientation for a JPEG image.
0,
3.
The clockwise rotation angle in degrees,
Camera devices may either encode this value into the JPEG EXIF header,
Note that this orientation is relative to the orientation of the camera sensor,
To translate from the device orientation given by the Android sensor APIs for camera
sensors which are not EXTERNAL,
private int getJpegOrientation(CameraCharacteristics c,For EXTERNAL cameras the sensor orientation will always be set to 0 and the facing will
also be set to EXTERNAL.
This tag is also used to describe the orientation of the HEIC image capture,
Compression quality of the final JPEG
image.
1-100; larger is higher quality
3.
85-95 is typical usage range.
Compression quality of JPEG
thumbnail.
1-100; larger is higher quality
3.
This tag is also used to describe the quality of the HEIC image capture.
Resolution of embedded JPEG thumbnail.
3.
When set to (0,
For best results,
If the thumbnail image aspect ratio differs from the JPEG primary image aspect
ratio,
When an android.
- Set the EXIF orientation flag
and keep jpeg and thumbnail image data unrotated.
- Rotate the jpeg and thumbnail image data and not set
EXIF orientation flag.
In this case, LIMITED or FULL hardware level devices will report rotated thumbnail size in capture result, so the width and height will be interchanged if 90 or 270 degree orientation is requested. LEGACY device will always report unrotated thumbnail size.
The tag is also used as thumbnail size for HEIC image format capture,
The HAL must not squeeze or stretch the downscaled primary image to generate thumbnail.
List of JPEG thumbnail sizes for android.
3.
This list will include at least one non-zero resolution,(0, for indicating no
thumbnail should be generated.
Below conditions will be satisfied for this size list:
- The sizes will be sorted by increasing pixel area (width x height).
If several resolutions have the same area, they will be sorted by increasing width. - The aspect ratio of the largest thumbnail size will be same as the
aspect ratio of largest JPEG output size in android.
scaler. available Stream Configurations. The largest size is defined as the size that has the largest pixel area in a given size list. - Each output JPEG size in android.
scaler. available Stream Configurations will have at least one corresponding size that has the same aspect ratio in availableThumbnailSizes, and vice versa. - All non-
(0,sizes will have non-zero widths and heights.0)
This list is also used as supported thumbnail sizes for HEIC image format capture.
Maximum size in bytes for the compressed
JPEG buffer,
Must be large enough to fit any JPEG produced by the camera
3.
This is used for sizing the gralloc buffers for JPEG
A location object to use when generating image GPS metadata.
3.
Setting a location object in a request will include the GPS coordinates of the location
into any JPEG images captured based on the request.
This tag is also used for HEIC image capture.
GPS coordinates to include in output JPEG
EXIF.
(-180 - 180],
3.
This tag is also used for HEIC image capture.
32 characters describing GPS algorithm to
include in EXIF.
3.
This tag is also used for HEIC image capture.
Time GPS fix was made to include in
EXIF.
3.
This tag is also used for HEIC image capture.
The orientation for a JPEG image.
0,
3.
The clockwise rotation angle in degrees,
Camera devices may either encode this value into the JPEG EXIF header,
Note that this orientation is relative to the orientation of the camera sensor,
To translate from the device orientation given by the Android sensor APIs for camera
sensors which are not EXTERNAL,
private int getJpegOrientation(CameraCharacteristics c,For EXTERNAL cameras the sensor orientation will always be set to 0 and the facing will
also be set to EXTERNAL.
This tag is also used to describe the orientation of the HEIC image capture,
Compression quality of the final JPEG
image.
1-100; larger is higher quality
3.
85-95 is typical usage range.
The size of the compressed JPEG image,
>= 0
3.
If no JPEG output is produced for the request,
Otherwise,
Compression quality of JPEG
thumbnail.
1-100; larger is higher quality
3.
This tag is also used to describe the quality of the HEIC image capture.
Resolution of embedded JPEG thumbnail.
3.
When set to (0,
For best results,
If the thumbnail image aspect ratio differs from the JPEG primary image aspect
ratio,
When an android.
- Set the EXIF orientation flag
and keep jpeg and thumbnail image data unrotated.
- Rotate the jpeg and thumbnail image data and not set
EXIF orientation flag.
In this case, LIMITED or FULL hardware level devices will report rotated thumbnail size in capture result, so the width and height will be interchanged if 90 or 270 degree orientation is requested. LEGACY device will always report unrotated thumbnail size.
The tag is also used as thumbnail size for HEIC image format capture,
The HAL must not squeeze or stretch the downscaled primary image to generate thumbnail.
The desired lens aperture size,
3.
Setting this value is only supported on the camera devices that have a variable
aperture lens.
When this is supported and android.
The requested aperture value may take several frames to reach the
requested value; the camera device will report the current (intermediate)
aperture size in capture result metadata while the aperture is changing.
When this is supported and android.
The desired setting for the lens neutral density filter(s).
3.
This control will not be supported on most camera devices.
Lens filters are typically used to lower the amount of light the
sensor is exposed to (measured in steps of EV).
It may take several frames before the lens filter density changes
to the requested value.
The desired lens focal length; used for optical zoom.
3.
This setting controls the physical focal length of the camera
device's lens.
Like android.
Optical zoom via this control will not be supported on most devices.
For a logical camera device supporting both optical and digital zoom,
Starting from API level 30,
Desired distance to plane of sharpest focus,
>= 0
3.
This control can be used for setting manual focus,
A value of 0. means infinity focus.[0..
Like android.
LEGACY devices support at most setting this to 0.
for infinity focus.
-
OFF (v3.2)
Optical stabilization is unavailable.
-
ON (v3.2)
[optional]
Optical stabilization is enabled.
Sets whether the camera device uses optical image stabilization (OIS)
when capturing images.
3.
OIS is used to compensate for motion blur due to small
movements of the camera during capture.
Switching between different optical stabilization modes may take several
frames to initialize,
If a camera device supports both OIS and digital image stabilization
(android.
If android.
Not all devices will support OIS; see
android.
List of aperture size values for android.
3.
If the camera device doesn't support a variable lens aperture,
If the camera device supports a variable aperture,
List of neutral density filter values for
android.
Values are >= 0
3.
If a neutral density filter is not supported by this camera device,
List of focal lengths for android.
Values are > 0
3.
If optical zoom is not supported,
List of optical image stabilization (OIS) modes for
android.
Any value listed in android.
3.
If OIS is not supported by a given camera device,
Hyperfocal distance for this lens.
If lens is fixed focus,(0.
3.
If the lens is not fixed focus,
Shortest distance from frontmost surface
of the lens that can be brought into sharp focus.
>= 0
3.
If the lens is fixed-focus,
Mandatory for FULL devices; LIMITED devices
must always set this value to 0 for fixed-focus; and may omit
the minimum focus distance otherwise.
This field is also mandatory for all devices advertising
the MANUAL_
Dimensions of lens shading map.
Both values >= 1
3.
The map should be on the order of 30-40 rows and columns,
-
UNCALIBRATED (v3.2)
The lens focus distance is not accurate,
and the units used for android. lens. focus Distance do not correspond to any physical units. Setting the lens to the same focus distance on separate occasions may result in a different real focus distance,
depending on factors such as the orientation of the device, the age of the focusing mechanism, and the device temperature. The focus distance value will still be in the range of [0,,android. lens. info. minimum Focus Distance] where 0 represents the farthest focus. -
APPROXIMATE (v3.2)
The lens focus distance is measured in diopters.
However,
setting the lens to the same focus distance on separate occasions may result in a different real focus distance, depending on factors such as the orientation of the device, the age of the focusing mechanism, and the device temperature. -
CALIBRATED (v3.2)
The lens focus distance is measured in diopters,
and is calibrated. The lens mechanism is calibrated so that setting the same focus distance is repeatable on multiple occasions with good accuracy,
and the focus distance corresponds to the real physical distance to the plane of best focus.
The lens focus distance calibration quality.
3.
The lens focus distance calibration quality determines the reliability of
focus related metadata entries,
APPROXIMATE and CALIBRATED devices report the focus metadata in
units of diopters (1/0. represents focusing at infinity,
UNCALIBRATED devices do not use units that are directly comparable
to any real physical measurement,0. still represents farthest
focus,
For devices advertise APPROXIMATE quality or higher,
-
FRONT (v3.2)
The camera device faces the same direction as the device's screen.
-
BACK (v3.2)
The camera device faces the opposite direction as the device's screen.
-
EXTERNAL (v3.2)
The camera device is an external camera,
and has no fixed facing relative to the device's screen.
Direction the camera faces relative to
device screen.
3.
The orientation of the camera relative to the sensor
coordinate system.
3.
The four coefficients that describe the quaternion
rotation from the Android sensor coordinate system to a
camera-aligned coordinate system where the X-axis is
aligned with the long side of the image sensor,
To convert from the quaternion coefficients (x,
to the axis of rotation (a_ and rotation
amount theta,
theta = 2 * acos(w)
a_To create a 3x3 rotation matrix that applies the rotation
defined by this quaternion,
R = [ 1 - 2y^2 - 2z^2,This matrix can then be used to apply the rotation to a column vector point with
p' = Rp
where p is in the device sensor coordinate system,p' is in the camera-oriented coordinate system.
If android.
Position of the camera optical center.
3.
The position of the camera device's lens optical center,(x,.
Prior to Android P,
If this device is the largest or only camera device with a given facing,(0,; a camera device with a lens optical center located 3 cm
from the main sensor along the +X axis (to the right from the user's perspective) will
report (0..
To transform a pixel coordinates between two cameras facing the same direction,
To compare this against a real image from the destination camera,
When android.
When android.(0,.
When android.
The parameters for this camera device's intrinsic
calibration.
3.
The five calibration parameters that describe the transform from camera-centric 3D coordinates to sensor pixel coordinates:
[f_Where f_ and f_ are the horizontal and vertical
focal lengths,[c_ is the position of the optical
axis,s is a skew parameter for the sensor plane not
being aligned with the lens plane.
These are typically used within a transformation matrix K:
K = [ f_which can then be combined with the camera pose rotation
R and translation t (android.
P = [ K 0 * [ R -Rt
0 1 ] 0 1 ]
(Note the negation of poseTranslation when mapping from camera
to world coordinates,
With p_ being a point in the world coordinate system
and p_ being a point in the camera active pixel array
coordinate system,
p_so [x_ is the pixel coordinates of the world
point,z_,w_ is a measurement of disparity
(depth) in pixel coordinates.
Note that the coordinate system for this transform is the
android.(0, is the top-left of the
preCorrectionActiveArraySize rectangle.(0, is the top-left of the
activeArraySize rectangle),
For camera devices,(x, is located at
coordinate (x + 0..(10,,(0,,(5.,(5,.
The correction coefficients to correct for this camera device's
radial and tangential lens distortion.
Deprecated. Do not use.
3.
Four radial distortion coefficients [kappa_ and two tangential distortion coefficients
[kappa_ that can be used to correct the
lens's geometric distortion with the mapping equations:
x_Here,[x_ are the coordinates to sample in the
input image that correspond to the pixel values in the
corrected image at the coordinate [x_:
correctedImage(x_The pixel coordinates are defined in a normalized
coordinate system related to the
android.[x_ and [x_ have (0, at the
lens optical center [c_.-1 <= x <= 1.
Finally,r represents the radial distance from the
optical center,r^2 = x_,|.
The distortion model used is the Brown-Conrady model.
-
PRIMARY_CAMERA (v3.3)
The value of android.
lens. pose Translation is relative to the optical center of the largest camera device facing the same direction as this camera. This is the default value for API levels before Android P.
-
GYROSCOPE (v3.3)
The value of android.
lens. pose Translation is relative to the position of the primary gyroscope of this Android device. -
UNDEFINED (v3.5)
The camera device cannot represent the values of android.
lens. pose Translation and android. lens. pose Rotation accurately enough. One such example is a camera device on the cover of a foldable phone: in order to measure the pose translation and rotation, some kind of hinge position sensor would be needed. The value of android.
lens. pose Translation must be all zeros, and android. lens. pose Rotation must be values matching its default facing. -
AUTOMOTIVE (v3.8)
The value of android.
lens. pose Translation is relative to the origin of the automotive sensor coordinate system, which is at the center of the rear axle.
The origin for android.
3.
Different calibration methods and use cases can produce better or worse results
depending on the selected coordinate origin.
The correction coefficients to correct for this camera device's
radial and tangential lens distortion.
Replaces the deprecated android.
3.
Three radial distortion coefficients [kappa_ and two tangential distortion coefficients
[kappa_ that can be used to correct the
lens's geometric distortion with the mapping equations:
x_Here,[x_ are the coordinates to sample in the
input image that correspond to the pixel values in the
corrected image at the coordinate [x_:
correctedImage(x_The pixel coordinates are defined in a coordinate system
related to the android.[x_ and [x_
have (0, at the lens optical center [c_,
Finally,r represents the radial distance from the
optical center,r^2 = x_.
The distortion model used is the Brown-Conrady model.
The correction coefficients to correct for this camera device's
radial and tangential lens distortion for a
CaptureRequest with android.
3.
Analogous to android.
The parameters for this camera device's intrinsic
calibration when android.
3.
Analogous to android.
The desired lens aperture size,
3.
Setting this value is only supported on the camera devices that have a variable
aperture lens.
When this is supported and android.
The requested aperture value may take several frames to reach the
requested value; the camera device will report the current (intermediate)
aperture size in capture result metadata while the aperture is changing.
When this is supported and android.
The desired setting for the lens neutral density filter(s).
3.
This control will not be supported on most camera devices.
Lens filters are typically used to lower the amount of light the
sensor is exposed to (measured in steps of EV).
It may take several frames before the lens filter density changes
to the requested value.
The desired lens focal length; used for optical zoom.
3.
This setting controls the physical focal length of the camera
device's lens.
Like android.
Optical zoom via this control will not be supported on most devices.
For a logical camera device supporting both optical and digital zoom,
Starting from API level 30,
Desired distance to plane of sharpest focus,
>= 0
3.
Should be zero for fixed-focus cameras
The range of scene distances that are in
sharp focus (depth of field).
>=0
3.
If variable focus not supported,
-
OFF (v3.2)
Optical stabilization is unavailable.
-
ON (v3.2)
[optional]
Optical stabilization is enabled.
Sets whether the camera device uses optical image stabilization (OIS)
when capturing images.
3.
OIS is used to compensate for motion blur due to small
movements of the camera during capture.
Switching between different optical stabilization modes may take several
frames to initialize,
If a camera device supports both OIS and digital image stabilization
(android.
If android.
Not all devices will support OIS; see
android.
-
STATIONARY (v3.2)
The lens parameters (android.
lens. focal Length, android. lens. focus Distance, android. lens. filter Density and android. lens. aperture) are not changing. -
MOVING (v3.2)
One or several of the lens parameters (android.
lens. focal Length, android. lens. focus Distance, android. lens. filter Density or android. lens. aperture) is currently changing.
Current lens status.
3.
For lens parameters android.
When the state is STATIONARY,
- Fixed focus (
android.),lens. info. minimum Focus Distance == 0 which means android. lens. focus Distance parameter will always be 0. - Fixed focal length (android.
lens. info. available Focal Lengths contains single value), which means the optical zoom is not supported. - No ND filter (android.
lens. info. available Filter Densities contains only 0). - Fixed aperture (android.
lens. info. available Apertures contains single value).
Then this state will always be STATIONARY.
When the state is MOVING,
The orientation of the camera relative to the sensor
coordinate system.
3.
The four coefficients that describe the quaternion
rotation from the Android sensor coordinate system to a
camera-aligned coordinate system where the X-axis is
aligned with the long side of the image sensor,
To convert from the quaternion coefficients (x,
to the axis of rotation (a_ and rotation
amount theta,
theta = 2 * acos(w)
a_To create a 3x3 rotation matrix that applies the rotation
defined by this quaternion,
R = [ 1 - 2y^2 - 2z^2,This matrix can then be used to apply the rotation to a column vector point with
p' = Rp
where p is in the device sensor coordinate system,p' is in the camera-oriented coordinate system.
If android.
Position of the camera optical center.
3.
The position of the camera device's lens optical center,(x,.
Prior to Android P,
If this device is the largest or only camera device with a given facing,(0,; a camera device with a lens optical center located 3 cm
from the main sensor along the +X axis (to the right from the user's perspective) will
report (0..
To transform a pixel coordinates between two cameras facing the same direction,
To compare this against a real image from the destination camera,
When android.
When android.(0,.
When android.
The parameters for this camera device's intrinsic
calibration.
3.
The five calibration parameters that describe the transform from camera-centric 3D coordinates to sensor pixel coordinates:
[f_Where f_ and f_ are the horizontal and vertical
focal lengths,[c_ is the position of the optical
axis,s is a skew parameter for the sensor plane not
being aligned with the lens plane.
These are typically used within a transformation matrix K:
K = [ f_which can then be combined with the camera pose rotation
R and translation t (android.
P = [ K 0 * [ R -Rt
0 1 ] 0 1 ]
(Note the negation of poseTranslation when mapping from camera
to world coordinates,
With p_ being a point in the world coordinate system
and p_ being a point in the camera active pixel array
coordinate system,
p_so [x_ is the pixel coordinates of the world
point,z_,w_ is a measurement of disparity
(depth) in pixel coordinates.
Note that the coordinate system for this transform is the
android.(0, is the top-left of the
preCorrectionActiveArraySize rectangle.(0, is the top-left of the
activeArraySize rectangle),
For camera devices,(x, is located at
coordinate (x + 0..(10,,(0,,(5.,(5,.
The correction coefficients to correct for this camera device's
radial and tangential lens distortion.
Deprecated. Do not use.
3.
Four radial distortion coefficients [kappa_ and two tangential distortion coefficients
[kappa_ that can be used to correct the
lens's geometric distortion with the mapping equations:
x_Here,[x_ are the coordinates to sample in the
input image that correspond to the pixel values in the
corrected image at the coordinate [x_:
correctedImage(x_The pixel coordinates are defined in a normalized
coordinate system related to the
android.[x_ and [x_ have (0, at the
lens optical center [c_.-1 <= x <= 1.
Finally,r represents the radial distance from the
optical center,r^2 = x_,|.
The distortion model used is the Brown-Conrady model.
The correction coefficients to correct for this camera device's
radial and tangential lens distortion.
Replaces the deprecated android.
3.
Three radial distortion coefficients [kappa_ and two tangential distortion coefficients
[kappa_ that can be used to correct the
lens's geometric distortion with the mapping equations:
x_Here,[x_ are the coordinates to sample in the
input image that correspond to the pixel values in the
corrected image at the coordinate [x_:
correctedImage(x_The pixel coordinates are defined in a coordinate system
related to the android.[x_ and [x_
have (0, at the lens optical center [c_,
Finally,r represents the radial distance from the
optical center,r^2 = x_.
The distortion model used is the Brown-Conrady model.
-
OFF (v3.2)
No noise reduction is applied.
-
FAST (v3.2)
Noise reduction is applied without reducing frame rate relative to sensor output.
It may be the same as OFF if noise reduction will reduce frame rate relative to sensor. -
HIGH_QUALITY (v3.2)
High-quality noise reduction is applied,
at the cost of possibly reduced frame rate relative to sensor output. -
MINIMAL (v3.2)
[optional]
MINIMAL noise reduction is applied without reducing frame rate relative to sensor output.
-
ZERO_SHUTTER_LAG (v3.2)
[optional]
Noise reduction is applied at different levels for different output streams,
based on resolution. Streams at maximum recording resolution (see CameraDevice#createCaptureSession) or below have noise reduction applied, while higher-resolution streams have MINIMAL (if supported) or no noise reduction applied (if MINIMAL is not supported. ) The degree of noise reduction for low-resolution streams is tuned so that frame rate is not impacted, and the quality is equal to or better than FAST (since it is only applied to lower-resolution outputs, quality may improve from FAST). This mode is intended to be used by applications operating in a zero-shutter-lag mode with YUV or PRIVATE reprocessing,
where the application continuously captures high-resolution intermediate buffers into a circular buffer, from which a final image is produced via reprocessing when a user takes a picture. For such a use case, the high-resolution buffers must not have noise reduction applied to maximize efficiency of preview and to avoid over-applying noise filtering when reprocessing, while low-resolution buffers (used for recording or preview, generally) need noise reduction applied for reasonable preview quality. This mode is guaranteed to be supported by devices that support either the YUV_
REPROCESSING or PRIVATE_ REPROCESSING capabilities (android. request. available Capabilities lists either of those capabilities) and it will be the default mode for CAMERA3_ TEMPLATE_ ZERO_ SHUTTER_ LAG template.
Mode of operation for the noise reduction algorithm.
3.
The noise reduction algorithm attempts to improve image quality by removing
excessive noise added by the capture process,
OFF means no noise reduction will be applied by the camera device,
MINIMAL means that only sensor raw domain basic noise reduction is enabled ,
FAST/
ZERO_
For YUV_
For YUV_
Control the amount of noise reduction applied to the images
1 - 10
3.
List of noise reduction modes for android.
Any value listed in android.
3.
Full-capability camera devices will always support OFF and FAST.
Camera devices that support YUV_
Legacy-capability camera devices will only support FAST mode.
HAL must support both FAST and HIGH_
-
OFF (v3.2)
No noise reduction is applied.
-
FAST (v3.2)
Noise reduction is applied without reducing frame rate relative to sensor output.
It may be the same as OFF if noise reduction will reduce frame rate relative to sensor. -
HIGH_QUALITY (v3.2)
High-quality noise reduction is applied,
at the cost of possibly reduced frame rate relative to sensor output. -
MINIMAL (v3.2)
[optional]
MINIMAL noise reduction is applied without reducing frame rate relative to sensor output.
-
ZERO_SHUTTER_LAG (v3.2)
[optional]
Noise reduction is applied at different levels for different output streams,
based on resolution. Streams at maximum recording resolution (see CameraDevice#createCaptureSession) or below have noise reduction applied, while higher-resolution streams have MINIMAL (if supported) or no noise reduction applied (if MINIMAL is not supported. ) The degree of noise reduction for low-resolution streams is tuned so that frame rate is not impacted, and the quality is equal to or better than FAST (since it is only applied to lower-resolution outputs, quality may improve from FAST). This mode is intended to be used by applications operating in a zero-shutter-lag mode with YUV or PRIVATE reprocessing,
where the application continuously captures high-resolution intermediate buffers into a circular buffer, from which a final image is produced via reprocessing when a user takes a picture. For such a use case, the high-resolution buffers must not have noise reduction applied to maximize efficiency of preview and to avoid over-applying noise filtering when reprocessing, while low-resolution buffers (used for recording or preview, generally) need noise reduction applied for reasonable preview quality. This mode is guaranteed to be supported by devices that support either the YUV_
REPROCESSING or PRIVATE_ REPROCESSING capabilities (android. request. available Capabilities lists either of those capabilities) and it will be the default mode for CAMERA3_ TEMPLATE_ ZERO_ SHUTTER_ LAG template.
Mode of operation for the noise reduction algorithm.
3.
The noise reduction algorithm attempts to improve image quality by removing
excessive noise added by the capture process,
OFF means no noise reduction will be applied by the camera device,
MINIMAL means that only sensor raw domain basic noise reduction is enabled ,
FAST/
ZERO_
For YUV_
For YUV_
If set to 1,
Deprecated. Do not use.
3.
Normalized coordinates refer to those in the
(-1000,
HAL implementations should instead always use and emit
sensor array-relative coordinates for all region data.
If set to 1,
Deprecated. Do not use.
3.
HAL implementations should implement AF trigger
modes for AUTO,
If set to 1,
Deprecated. Do not use.
3.
HAL implementations should use gralloc usage flags
to determine that a stream will be used for
zero-shutter-lag,
If set to 1,
Deprecated. Do not use.
3.
Does not need to be listed in static
metadata.
Refer to camera3_
for information on how to implement partial results.
-
FINAL (v3.2)
The last or only metadata result buffer for this capture.
-
PARTIAL (v3.2)
A partial buffer of result metadata for this capture.
More result buffers for this capture will be sent by the camera device, the last of which will be marked FINAL.
Whether a result given to the framework is the
final one for the capture,
Deprecated. Do not use.
Optional.
3.
The entries in the result metadata buffers for a
single capture may not overlap,
Refer to camera3_
for information on how to implement partial results.
A frame counter set by the framework.
Deprecated. Do not use.
Any int.
3.
An application-specified ID for the current
request.
Any int
3.
List which camera reprocess stream is used
for the source of reprocessing data.
Deprecated. Do not use.
Typically,
3.
Only meaningful when android.
-
NONE (v3.2)
No metadata should be produced on output,
except for application-bound buffer data. If no application-bound streams exist, no frame should be placed in the output frame queue. If such streams exist, a frame should be placed on the output queue with null metadata but with the necessary output buffer information. Timestamp information should still be included with any output stream buffers -
FULL (v3.2)
All metadata should be produced.
Statistics will only be produced if they are separately enabled
How much metadata to produce on output
3.
Lists which camera output streams image data from this capture must be sent to
Deprecated. Do not use.
List must only include streams that have been created
3.
If no output streams are listed,
-
CAPTURE (v3.2)
Capture a new image from the imaging hardware,
and process it according to the settings -
REPROCESS (v3.2)
Process previously captured data; the android.
request. input Streams parameter determines the source reprocessing stream. TODO: Mark dynamic metadata needed for reprocessing with [RP]
The type of the request; either CAPTURE or
REPROCESS.
Deprecated. Do not use.
3.
The maximum numbers of different types of output streams
that can be configured and used simultaneously by a camera device.
For processed (and stalling) format streams,
For Raw format (either stalling or non-stalling) streams,
For processed (but not stalling) format streams,android.);
>= 2 for LIMITED mode devices (android.).
3.
This is a 3 element tuple that contains the max number of output simultaneous
streams for raw sensor,(1,.
This lists the upper bound of the number of output streams supported by
the camera device.
- Processed (but stalling): any non-RAW format with a stallDurations > 0.
Typically JPEG format. - Raw formats: RAW_
SENSOR, RAW10, or RAW12. - Processed (but not-stalling): any non-RAW format without a stall duration.
Typically YUV_ 420_ 888, NV21, YV12, or Y8 .
The maximum numbers of different types of output streams
that can be configured and used simultaneously by a camera device
for any RAW formats.
>= 0
3.
This value contains the max number of output simultaneous
streams from the raw sensor.
This lists the upper bound of the number of output streams supported by
the camera device.RAW and supported format provided by android.
In particular,RAW format is typically one of:
LEGACY mode devices (android.== LEGACY)
never support raw streams.
The maximum numbers of different types of output streams
that can be configured and used simultaneously by a camera device
for any processed (but not-stalling) formats.
>= 3
for FULL mode devices (android.);
>= 2 for LIMITED mode devices (android.).
3.
This value contains the max number of output simultaneous
streams for any processed (but not-stalling) formats.
This lists the upper bound of the number of output streams supported by
the camera device.RAW and supported format provided by android.
Processed (but not-stalling) is defined as any non-RAW format without a stall duration.
- YUV_
420_ 888 - NV21
- YV12
- Implementation-defined formats,
i. e. StreamConfigurationMap#isOutputSupportedFor(Class) - Y8
For full guarantees,
LEGACY devices will support at least 2 processing/
The maximum numbers of different types of output streams
that can be configured and used simultaneously by a camera device
for any processed (and stalling) formats.
>= 1
3.
This value contains the max number of output simultaneous
streams for any processed (but not-stalling) formats.
This lists the upper bound of the number of output streams supported by
the camera device.RAW and supported format provided by android.
A processed and stalling format is defined as any non-RAW format with a stallDurations
> 0.
For full guarantees,
LEGACY devices will support up to 1 processing/
How many reprocessing streams of any type
can be allocated at the same time.
Deprecated. Do not use.
>= 0
3.
Only used by HAL2.
When set to 0,
The maximum numbers of any type of input streams
that can be configured and used simultaneously by a camera device.
0 or 1.
3.
When set to 0,
The image format for a input stream can be any supported format returned by StreamConfigurationMap#getInputFormats.
When an input stream and some output streams are used in a reprocessing request,
For example,
For the reprocessing flow and controls,
Specifies the number of maximum pipeline stages a frame
has to go through from when it's exposed to when it's available
to the framework.
3.
A typical minimum value for this is 2 (one stage to expose,
Depending on what settings are used (e.
A pipeline depth of X stages is equivalent to a pipeline latency of
X frame intervals.
This value will normally be 8 or less,
This value should be 4 or less,
Defines how many sub-components
a result will be composed of.
>= 1
3.
In order to combat the pipeline latency,
Optional; defaults to 1.
A typical use case for this might be: after requesting an
auto-focus (AF) lock the new AF state might be available 50%
of the way through the pipeline.
-
BACKWARD_COMPATIBLE (v3.2)
The minimal set of capabilities that every camera device (regardless of android.
info. supported Hardware Level) supports. This capability is listed by all normal devices,
and indicates that the camera device has a feature set that's comparable to the baseline requirements for the older android. hardware. Camera API. Devices with the DEPTH_
OUTPUT capability might not list this capability, indicating that they support only depth measurement, not standard color output. -
MANUAL_SENSOR (v3.2)
[optional]
The camera device can be manually controlled (3A algorithms such as auto-exposure,
and auto-focus can be bypassed). The camera device supports basic manual control of the sensor image acquisition related stages. This means the following controls are guaranteed to be supported: - Manual frame duration control
- Manual exposure control
- Manual sensitivity control
- Manual lens control (if the lens is adjustable)
- android.
lens. *
- android.
- Manual flash control (if a flash unit is present)
- android.
flash. *
- android.
- Manual black level locking
- Auto exposure lock
If any of the above 3A algorithms are enabled,
then the camera device will accurately report the values applied by 3A in the result. A given camera device may also support additional manual sensor controls,
but this capability only covers the above list of controls. If this is supported,
android. scaler. stream Configuration Map will additionally return a min frame duration that is greater than zero for each supported size-format combination. For camera devices with LOGICAL_
MULTI_ CAMERA capability, when the underlying active physical camera switches, exposureTime, sensitivity, and lens properties may change even if AE/ AF is locked. However, the overall auto exposure and auto focus experience for users will be consistent. Refer to LOGICAL_ MULTI_ CAMERA capability for details. -
MANUAL_POST_PROCESSING (v3.2)
[optional]
The camera device post-processing stages can be manually controlled.
The camera device supports basic manual control of the image post-processing stages. This means the following controls are guaranteed to be supported: -
Manual tonemap control
-
Manual white balance control
- Manual lens shading map control
- Manual aberration correction control (if aberration correction is supported)
- Auto white balance lock
If auto white balance is enabled,
then the camera device will accurately report the values applied by AWB in the result. A given camera device may also support additional post-processing controls,
but this capability only covers the above list of controls. For camera devices with LOGICAL_
MULTI_ CAMERA capability, when underlying active physical camera switches, tonemap, white balance, and shading map may change even if awb is locked. However, the overall post-processing experience for users will be consistent. Refer to LOGICAL_ MULTI_ CAMERA capability for details. -
-
RAW (v3.2)
[optional]
The camera device supports outputting RAW buffers and metadata for interpreting them.
Devices supporting the RAW capability allow both for saving DNG files,
and for direct application processing of raw sensor images. - RAW_
SENSOR is supported as an output format. - The maximum available resolution for RAW_
SENSOR streams will match either the value in android. sensor. info. pixel Array Size or android. sensor. info. pre Correction Active Array Size. - All DNG-related optional metadata entries are provided
by the camera device.
- RAW_
-
PRIVATE_REPROCESSING (v3.2)
[optional]
[java_public]
The camera device supports the Zero Shutter Lag reprocessing use case.
- One input stream is supported,
that is, android..request. max Num Input Streams == 1 - ImageFormat#PRIVATE is supported as an output/
input format, that is, ImageFormat#PRIVATE is included in the lists of formats returned by StreamConfigurationMap#getInputFormats and StreamConfigurationMap#getOutputFormats. - StreamConfigurationMap#getValidOutputFormatsForInput
returns non-empty int[] for each supported input format returned by StreamConfigurationMap#getInputFormats.
- Each size returned by getInputSizes(ImageFormat.
PRIVATE) is also included in getOutputSizes(ImageFormat. PRIVATE) - Using ImageFormat#PRIVATE does not cause a frame rate drop
relative to the sensor's maximum capture rate (at that resolution).
- ImageFormat#PRIVATE will be reprocessable into both
Image
Format#YUV_ 420_ 888 and ImageFormat#JPEG formats. - For a MONOCHROME camera supporting Y8 format,
ImageFormat#PRIVATE will be reprocessable into ImageFormat#Y8. - The maximum available resolution for PRIVATE streams
(both input/
output) will match the maximum available resolution of JPEG streams. - Static metadata android.
reprocess. max Capture Stall. - Only below controls are effective for reprocessing requests and
will be present in capture results,
other controls in reprocess requests will be ignored by the camera device. - android.
jpeg. * - android.
noise Reduction. mode - android.
edge. mode
- android.
- android.
noise Reduction. available Noise Reduction Modes and android. edge. available Edge Modes will both list ZERO_ SHUTTER_ LAG as a supported mode.
- One input stream is supported,
-
READ_SENSOR_SETTINGS (v3.2)
[optional]
The camera device supports accurately reporting the sensor settings for many of the sensor controls while the built-in 3A algorithm is running.
This allows reporting of sensor settings even when these settings cannot be manually changed. The values reported for the following controls are guaranteed to be available in the CaptureResult,
including when 3A is enabled: - Exposure control
- Sensitivity control
- Lens controls (if the lens is adjustable)
This capability is a subset of the MANUAL_
SENSOR control capability, and will always be included if the MANUAL_ SENSOR capability is available. -
BURST_CAPTURE (v3.2)
[optional]
The camera device supports capturing high-resolution images at >= 20 frames per second,
in at least the uncompressed YUV format, when post-processing settings are set to FAST. Additionally, all image resolutions less than 24 megapixels can be captured at >= 10 frames per second. Here, 'high resolution' means at least 8 megapixels, or the maximum resolution of the device, whichever is smaller. -
YUV_REPROCESSING (v3.2)
[optional]
[java_public]
The camera device supports the YUV_
420_ 888 reprocessing use case, similar as PRIVATE_ REPROCESSING, This capability requires the camera device to support the following: - One input stream is supported,
that is, android..request. max Num Input Streams == 1 - Image
Format#YUV_ 420_ 888 is supported as an output/ input format, that is, YUV_ 420_ 888 is included in the lists of formats returned by StreamConfigurationMap#getInputFormats and StreamConfigurationMap#getOutputFormats. - StreamConfigurationMap#getValidOutputFormatsForInput
returns non-empty int[] for each supported input format returned by StreamConfigurationMap#getInputFormats.
- Each size returned by get
Input Sizes(YUV_ 420_ 888) is also included in get Output Sizes(YUV_ 420_ 888) - Using Image
Format#YUV_ 420_ 888 does not cause a frame rate drop relative to the sensor's maximum capture rate (at that resolution). - Image
Format#YUV_ 420_ 888 will be reprocessable into both Image Format#YUV_ 420_ 888 and ImageFormat#JPEG formats. - The maximum available resolution for Image
Format#YUV_ 420_ 888 streams (both input/ output) will match the maximum available resolution of ImageFormat#JPEG streams. - For a MONOCHROME camera with Y8 format support,
all the requirements mentioned above for YUV_ 420_ 888 apply for Y8 format as well. - Static metadata android.
reprocess. max Capture Stall. - Only the below controls are effective for reprocessing requests and will be present
in capture results.
The reprocess requests are from the original capture results that are associated with the intermediate Image Format#YUV_ 420_ 888 output buffers. All other controls in the reprocess requests will be ignored by the camera device. - android.
noise Reduction. available Noise Reduction Modes and android. edge. available Edge Modes will both list ZERO_ SHUTTER_ LAG as a supported mode.
- One input stream is supported,
-
DEPTH_OUTPUT (v3.2)
[optional]
The camera device can produce depth measurements from its field of view.
This capability requires the camera device to support the following:
- ImageFormat#DEPTH16 is supported as
an output format.
- Image
Format#DEPTH_ POINT_ CLOUD is optionally supported as an output format. - This camera device,
and all camera devices with the same android. lens. facing, will list the following calibration metadata entries in both CameraCharacteristics and CaptureResult: - The android.
depth. depth Is Exclusive entry is listed by this device. - As of Android P,
the android. lens. pose Reference entry is listed by this device. - A LIMITED camera with only the DEPTH_
OUTPUT capability does not have to support normal YUV_ 420_ 888, Y8, JPEG, and PRIV-format outputs. It only has to support the DEPTH16 format.
Generally,
depth output operates at a slower frame rate than standard color capture, so the DEPTH16 and DEPTH_ POINT_ CLOUD formats will commonly have a stall duration that should be accounted for (see StreamConfigurationMap#getOutputStallDuration). On a device that supports both depth and color-based output, to enable smooth preview, using a repeating burst is recommended, where a depth-output target is only included once every N frames, where N is the ratio between preview output rate and depth output rate, including depth stall time. - ImageFormat#DEPTH16 is supported as
an output format.
-
CONSTRAINED_HIGH_SPEED_VIDEO (v3.2)
[optional]
[java_public]
The device supports constrained high speed video recording (frame rate >=120fps) use case.
The camera device will support high speed capture session created by CameraDevice#createConstrainedHighSpeedCaptureSession, which only accepts high speed request lists created by CameraConstrainedHighSpeedCaptureSession#createHighSpeedRequestList. A camera device can still support high speed video streaming by advertising the high speed FPS ranges in android.
control. ae Available Target Fps Ranges. For this case, all normal capture request per frame control and synchronization requirements will apply to the high speed fps ranges, the same as all other fps ranges. This capability describes the capability of a specialized operating mode with many limitations (see below), which is only targeted at high speed video recording. The supported high speed video sizes and fps ranges are specified in StreamConfigurationMap#getHighSpeedVideoFpsRanges.
To get desired output frame rates, the application is only allowed to select video size and FPS range combinations provided by StreamConfigurationMap#getHighSpeedVideoSizes. The fps range can be controlled via android. control. ae Target Fps Range. In this capability,
the camera device will override aeMode, awbMode, and afMode to ON, AUTO, and CONTINUOUS_ VIDEO, respectively. All post-processing block mode controls will be overridden to be FAST. Therefore, no manual control of capture and post-processing parameters is possible. All other controls operate the same as when android. control. mode == AUTO. This means that all other android. control. * fields continue to work, such as - android.
control. ae Target Fps Range - android.
control. ae Exposure Compensation - android.
control. ae Lock - android.
control. awb Lock - android.
control. effect Mode - android.
control. ae Regions - android.
control. af Regions - android.
control. awb Regions - android.
control. af Trigger - android.
control. ae Precapture Trigger - android.
control. zoom Ratio
Outside of android.
control. *, the following controls will work: - android.
flash. mode (TORCH mode only, automatic flash for still capture will not work since aeMode is ON) - android.
lens. optical Stabilization Mode (if it is supported) - android.
scaler. crop Region - android.
statistics. face Detect Mode (if it is supported)
For high speed recording use case,
the actual maximum supported frame rate may be lower than what camera can output, depending on the destination Surfaces for the image data. For example, if the destination surface is from video encoder, the application need check if the video encoder is capable of supporting the high frame rate for a given video size, or it will end up with lower recording frame rate. If the destination surface is from preview window, the actual preview frame rate will be bounded by the screen refresh rate. The camera device will only support up to 2 high speed simultaneous output surfaces (preview and recording surfaces) in this mode.
Above controls will be effective only if all of below conditions are true: - The application creates a camera capture session with no more than 2 surfaces via
CameraDevice#createConstrainedHighSpeedCaptureSession.
The targeted surfaces must be preview surface (either from SurfaceView or SurfaceTexture) or recording surface(either from MediaRecorder#getSurface or MediaCodec#createInputSurface). - The stream sizes are selected from the sizes reported by
StreamConfigurationMap#getHighSpeedVideoSizes.
- The FPS ranges are selected from StreamConfigurationMap#getHighSpeedVideoFpsRanges.
When above conditions are NOT satisfied,
CameraDevice#createConstrainedHighSpeedCaptureSession will fail. Switching to a FPS range that has different maximum FPS may trigger some camera device reconfigurations,
which may introduce extra latency. It is recommended that the application avoids unnecessary maximum target FPS changes as much as possible during high speed streaming. - android.
-
MOTION_TRACKING (v3.3)
[optional]
The camera device supports the MOTION_
TRACKING value for android. control. capture Intent, which limits maximum exposure time to 20 ms. This limits the motion blur of capture images,
resulting in better image tracking results for use cases such as image stabilization or augmented reality. -
LOGICAL_MULTI_CAMERA (v3.3)
[optional]
The camera device is a logical camera backed by two or more physical cameras.
In API level 28,
the physical cameras must also be exposed to the application via CameraManager#getCameraIdList. Starting from API level 29:
- Some or all physical cameras may not be independently exposed to the application,
in which case the physical camera IDs will not be available in CameraManager#getCameraIdList. But the application can still query the physical cameras' characteristics by calling CameraManager#getCameraCharacteristics. - If a physical camera is hidden from camera ID list,
the mandatory stream combinations for that physical camera must be supported through the logical camera using physical streams. One exception is that in API level 30, a physical camera may become unavailable via AvailabilityCallback#onPhysicalCameraUnavailable callback.
Combinations of logical and physical streams,
or physical streams from different physical cameras are not guaranteed. However, if the camera device supports CameraDevice#isSessionConfigurationSupported, application must be able to query whether a stream combination involving physical streams is supported by calling CameraDevice#isSessionConfigurationSupported. Camera application shouldn't assume that there are at most 1 rear camera and 1 front camera in the system.
For an application that switches between front and back cameras, the recommendation is to switch between the first rear camera and the first front camera in the list of supported camera devices. This capability requires the camera device to support the following:
- The IDs of underlying physical cameras are returned via
CameraCharacteristics#getPhysicalCameraIds.
- This camera device must list static metadata
android.
logical Multi Camera. sensor Sync Type in CameraCharacteristics. - The underlying physical cameras' static metadata must list the following entries,
so that the application can correlate pixels from the physical streams: - The SENSOR_
INFO_ TIMESTAMP_ SOURCE of the logical device and physical devices must be the same. - The logical camera must be LIMITED or higher device.
A logical camera device's dynamic metadata may contain android.
logical Multi Camera. active Physical Id to notify the application of the current active physical camera Id. An active physical camera is the physical camera from which the logical camera's main image data outputs (YUV or RAW) and metadata come from. In addition, this serves as an indication which physical camera is used to output to a RAW stream, or in case only physical cameras support RAW, which physical RAW stream the application should request. Logical camera's static metadata tags below describe the default active physical camera.
An active physical camera is default if it's used when application directly uses requests built from a template. All templates will default to the same active physical camera. - android.
sensor. info. sensitivity Range - android.
sensor. info. color Filter Arrangement - android.
sensor. info. exposure Time Range - android.
sensor. info. max Frame Duration - android.
sensor. info. physical Size - android.
sensor. info. white Level - android.
sensor. info. lens Shading Applied - android.
sensor. reference Illuminant1 - android.
sensor. reference Illuminant2 - android.
sensor. calibration Transform1 - android.
sensor. calibration Transform2 - android.
sensor. color Transform1 - android.
sensor. color Transform2 - android.
sensor. forward Matrix1 - android.
sensor. forward Matrix2 - android.
sensor. black Level Pattern - android.
sensor. max Analog Sensitivity - android.
sensor. optical Black Regions - android.
sensor. available Test Pattern Modes - android.
lens. info. hyperfocal Distance - android.
lens. info. minimum Focus Distance - android.
lens. info. focus Distance Calibration - android.
lens. pose Rotation - android.
lens. pose Translation - android.
lens. intrinsic Calibration - android.
lens. pose Reference - android.
lens. distortion
The field of view of non-RAW physical streams must not be smaller than that of the non-RAW logical streams,
or the maximum field-of-view of the physical camera, whichever is smaller. The application should check the physical capture result metadata for how the physical streams are cropped or zoomed. More specifically, given the physical camera result metadata, the effective horizontal field-of-view of the physical camera is: fov = 2 * atan2(cropW * sensorW /(2 * zoomRatio * activeArrayW), focalLength) where the equation parameters are the physical camera's crop region width,
physical sensor width, zoom ratio, active array width, and focal length respectively. Typically the physical stream of active physical camera has the same field-of-view as the logical streams. However, the same may not be true for physical streams from non-active physical cameras. For example, if the logical camera has a wide-ultrawide configuration where the wide lens is the default, when the crop region is set to the logical camera's active array size, (and the zoom ratio set to 1. 0 starting from Android 11), a physical stream for the ultrawide camera may prefer outputting images with larger field-of-view than that of the wide camera for better stereo matching margin or more robust motion tracking. At the same time, the physical non-RAW streams' field of view must not be smaller than the requested crop region and zoom ratio, as long as it's within the physical lens' capability. For example, for a logical camera with wide-tele lens configuration where the wide lens is the default, if the logical camera's crop region is set to maximum size, and zoom ratio set to 1. 0, the physical stream for the tele lens will be configured to its maximum size crop region (no zoom). Deprecated: Prior to Android 11,
the field of view of all non-RAW physical streams cannot be larger than that of non-RAW logical streams. If the logical camera has a wide-ultrawide lens configuration where the wide lens is the default, when the logical camera's crop region is set to maximum size, the FOV of the physical streams for the ultrawide lens will be the same as the logical stream, by making the crop region smaller than its active array size to compensate for the smaller focal length. For a logical camera,
typically the underlying physical cameras have different RAW capabilities (such as resolution or CFA pattern). There are two ways for the application to capture RAW images from the logical camera: - If the logical camera has RAW capability,
the application can create and use RAW streams in the same way as before. In case a RAW stream is configured, to maintain backward compatibility, the camera device makes sure the default active physical camera remains active and does not switch to other physical cameras. (One exception is that, if the logical camera consists of identical image sensors and advertises multiple focalLength due to different lenses, the camera device may generate RAW images from different physical cameras based on the focalLength being set by the application. ) This backward-compatible approach usually results in loss of optical zoom, to telephoto lens or to ultrawide lens. - Alternatively,
if supported by the device, MultiResolutionImageReader can be used to capture RAW images from one of the underlying physical cameras ( depending on current zoom level). Because different physical cameras may have different RAW characteristics, the application needs to use the characteristics and result metadata of the active physical camera for the relevant RAW metadata.
The capture request and result metadata tags required for backward compatible camera functionalities will be solely based on the logical camera capability.
On the other hand, the use of manual capture controls (sensor or post-processing) with a logical camera may result in unexpected behavior when the HAL decides to switch between physical cameras with different characteristics under the hood. For example, when the application manually sets exposure time and sensitivity while zooming in, the brightness of the camera images may suddenly change because HAL switches from one physical camera to the other. - Some or all physical cameras may not be independently exposed to the application,
-
MONOCHROME (v3.3)
[optional]
The camera device is a monochrome camera that doesn't contain a color filter array,
and for YUV_ 420_ 888 stream, the pixel values on U and V planes are all 128. A MONOCHROME camera must support the guaranteed stream combinations required for its device level and capabilities.
Additionally, if the monochrome camera device supports Y8 format, all mandatory stream combination requirements related to YUV_ 420_ 888 apply to Y8 as well. There are no mandatory stream combination requirements with regard to Y8 for Bayer camera devices. Starting from Android Q,
the SENSOR_ INFO_ COLOR_ FILTER_ ARRANGEMENT of a MONOCHROME camera will be either MONO or NIR. -
SECURE_IMAGE_DATA (v3.4)
[optional]
The camera device is capable of writing image data into a region of memory inaccessible to Android userspace or the Android kernel,
and only accessible to trusted execution environments (TEE). -
SYSTEM_CAMERA (v3.5)
[optional]
The camera device is only accessible by Android's system components and privileged applications.
Processes need to have the android. permission. SYSTEM_ CAMERA in addition to android. permission. CAMERA in order to connect to this camera device. -
OFFLINE_PROCESSING (v3.5)
[optional]
[java_public]
The camera device supports the OFFLINE_
PROCESSING use case. With OFFLINE_
PROCESSING capability, the application can switch an ongoing capture session to offline mode by calling the CameraCaptureSession#switchToOffline method and specify streams to be kept in offline mode. The camera will then stop currently active repeating requests, prepare for some requests to go into offline mode, and return an offline session object. After the switchToOffline call returns, the original capture session is in closed state as if the CameraCaptureSession#close method has been called. In the offline mode, all inflight requests will continue to be processed in the background, and the application can immediately close the camera or create a new capture session without losing those requests' output images and capture results. While the camera device is processing offline requests,
it might not be able to support all stream configurations it can support without offline requests. When that happens, the createCaptureSession method call will fail. The following stream configurations are guaranteed to work without hitting the resource busy exception: - One ongoing offline session: target one output surface of YUV or
JPEG format,
any resolution. - The active camera capture session:
- One preview surface (SurfaceView or SurfaceTexture) up to 1920 width
- One YUV ImageReader surface up to 1920 width
- One Jpeg ImageReader,
any resolution: the camera device is allowed to slow down JPEG output speed by 50% if there is any ongoing offline session. - If the device supports PRIVATE_
REPROCESSING, one pair of ImageWriter/ ImageReader surfaces of private format, with the same resolution that is larger or equal to the JPEG ImageReader resolution above.
- Alternatively,
the active camera session above can be replaced by an legacy Camera with the following parameter settings: - Preview size up to 1920 width
- Preview callback size up to 1920 width
- Video size up to 1920 width
- Picture size,
any resolution: the camera device is allowed to slow down JPEG output speed by 50% if there is any ongoing offline session.
- One ongoing offline session: target one output surface of YUV or
JPEG format,
-
ULTRA_HIGH_RESOLUTION_SENSOR (v3.6)
[optional]
This camera device is capable of producing ultra high resolution images in addition to the image sizes described in the android.
scaler. stream Configuration Map. It can operate in 'default' mode and 'max resolution' mode. It generally does this by binning pixels in 'default' mode and not binning them in 'max resolution' mode. android.describes the streams supported in 'default' mode.scaler. stream Configuration Map The stream configurations supported in 'max resolution' mode are described by android..scaler. stream Configuration Map Maximum Resolution The maximum resolution mode pixel array size of a camera device ( android.) with this capability,sensor. info. pixel Array Size will be at least 24 megapixels. -
REMOSAIC_REPROCESSING (v3.6)
[optional]
[java_public]
The device supports reprocessing from the
RAW_format with a bayer pattern given by android.SENSOR sensor. info. binning Factor (m x n group of pixels with the same color filter) to a remosaiced regular bayer pattern. This capability will only be present for devices with Camera
Metadata#REQUEST_ AVAILABLE_ CAPABILITIES_ ULTRA_ HIGH_ RESOLUTION_ SENSOR capability. When Camera Metadata#REQUEST_ AVAILABLE_ CAPABILITIES_ ULTRA_ HIGH_ RESOLUTION_ SENSOR devices do not advertise this capability, ImageFormat#RAW_ SENSOR images will already have a regular bayer pattern. If a
RAW_stream is requested along with another non-RAW stream in a CaptureRequest (if multiple streams are supported when android.SENSOR sensor. pixel Mode is set to Camera Metadata#SENSOR_ PIXEL_ MODE_ MAXIMUM_ RESOLUTION), the RAW_stream will have a regular bayer pattern.SENSOR This capability requires the camera device to support the following :
- The StreamConfigurationMap mentioned below
refers to the one,
described by android..scaler. stream Configuration Map Maximum Resolution - One input stream is supported,
that is, android..request. max Num Input Streams == 1 - ImageFormat#RAW_
SENSOR is supported as an output/ input format, that is, ImageFormat#RAW_ SENSOR is included in the lists of formats returned by StreamConfigurationMap#getInputFormats and StreamConfigurationMap#getOutputFormats. - StreamConfigurationMap#getValidOutputFormatsForInput
returns non-empty int[] for each supported input format returned by StreamConfigurationMap#getInputFormats.
- Each size returned by getInputSizes(ImageFormat.
RAW_ SENSOR) is also included in getOutputSizes(ImageFormat. RAW_ SENSOR) - Using ImageFormat#RAW_
SENSOR does not cause a frame rate drop relative to the sensor's maximum capture rate (at that resolution). - No CaptureRequest controls will be applicable when a request has an input target
with ImageFormat#RAW_
SENSOR format.
- The StreamConfigurationMap mentioned below
refers to the one,
-
DYNAMIC_RANGE_TEN_BIT (v3.8)
[optional]
[java_public]
The device supports one or more 10-bit camera outputs according to the dynamic range profiles specified in DynamicRangeProfiles#getSupportedProfiles.
They can be configured as part of the capture session initialization via OutputConfiguration#setDynamicRangeProfile. Cameras that enable this capability must also support the following: - Profile DynamicRangeProfiles#HLG10
- All mandatory stream combinations for this specific capability as per documentation CameraDevice#createCaptureSession
- In case the device is not able to capture some combination of supported
standard 8-bit and/
or 10-bit dynamic range profiles within the same capture request, then those constraints must be listed in DynamicRangeProfiles#getProfileCaptureRequestConstraints - Recommended dynamic range profile listed in
Camera
Characteristics#REQUEST_ RECOMMENDED_ TEN_ BIT_ DYNAMIC_ RANGE_ PROFILE.
-
STREAM_USE_CASE (v3.8)
[optional]
The camera device supports selecting a per-stream use case via OutputConfiguration#setStreamUseCase so that the device can optimize camera pipeline parameters such as tuning,
sensor mode, or ISP settings for a specific user scenario. Some sample usages of this capability are: - Distinguish high quality YUV captures from a regular YUV stream where
the image quality may not be as good as the JPEG stream,
or - Use one stream to serve multiple purposes: viewfinder,
video recording and still capture. This is common with applications that wish to apply edits equally to preview, saved images, and saved videos.
This capability requires the camera device to support the following stream use cases:
- DEFAULT for backward compatibility where the application doesn't set a stream use case
- PREVIEW for live viewfinder and in-app image analysis
- STILL_
CAPTURE for still photo capture - VIDEO_
RECORD for recording video clips - PREVIEW_
VIDEO_ STILL for one single stream used for viewfinder, video recording, and still capture. - VIDEO_
CALL for long running video calls
Camera
Characteristics#SCALER_ AVAILABLE_ STREAM_ USE_ CASES lists all of the supported stream use cases. Refer to CameraDevice#createCaptureSession for the mandatory stream combinations involving stream use cases,
which can also be queried via MandatoryStreamCombination. - Distinguish high quality YUV captures from a regular YUV stream where
the image quality may not be as good as the JPEG stream,
List of capabilities that this camera device
advertises as fully supporting.
3.
A capability is a contract that the camera device makes in order
to be able to satisfy one or more use cases.
Listing a capability guarantees that the whole set of features
required to support a common use will all be available.
Using a subset of the functionality provided by an unsupported
capability may be possible on a specific camera device implementation;
to do this query each of android.
The following capabilities are guaranteed to be available on
android.== FULL devices:
- MANUAL_
SENSOR - MANUAL_
POST_ PROCESSING
Other capabilities may be available on either FULL or LIMITED
devices,
Additional constraint details per-capability will be available
in the Compatibility Test Suite.
Minimum baseline requirements required for the
BACKWARD_
Listed controls that can be either request or result (e.
For example,
If MANUAL_
For PRIVATE_
Devices that support the MANUAL_
Devices that support the PRIVATE_
For DEPTH_
For a camera device with LOGICAL_
-
In camera1 API,
to maintain application compatibility, for each camera facing, there may be one or more {logical_ camera_ id, physical_ camera_ 1_ id, physical_ camera_ 2_ id, ... } combinations, where logical_ camera_ id is composed of physical_ camera_ N_ id, camera framework will only advertise one camera id (within the combinations for the particular facing) that is frontmost in the HAL published camera id list. For example, if HAL advertises 6 back facing camera IDs (ID0 to ID5), among which ID4 and ID5 are logical cameras backed by ID0+ID1 and ID2+ID3 respectively. In this case, only ID0 will be available for camera1 API to use. -
Camera HAL is strongly recommended to advertise camera devices with best feature,
power, performance, and latency tradeoffs at the front of the camera id list. -
Camera HAL may switch between physical cameras depending on focalLength,
cropRegion, or zoomRatio. If physical cameras have different sizes, HAL must maintain a single logical camera active Array Size/ pixel Array Size/ pre Correction Active Array Size, and must do proper mapping between logical camera and underlying physical cameras for all related metadata tags, such as crop region, zoomRatio, 3A regions, and intrinsicCalibration. -
Starting from HIDL ICameraDevice version 3.
5, camera HAL must support isStreamCombinationSupported for application to query whether a particular logical and physical streams combination are supported.
A MONOCHROME camera device must also advertise BACKWARD_
-
To maintain backward compatibility,
the camera device must support all BACKWARD_ COMPATIBLE required keys. The android. control. awb Available Modes key only contains AUTO, and android. control. awb State are either CONVERGED or LOCKED depending on android. control. awb Lock. -
android.
color Correction. mode, android. color Correction. transform, and android. color Correction. gains must not be in available request and result keys. As a result, the camera device cannot be a FULL device. However, the HAL can still advertise other individual capabilities. -
If the device supports tonemap control,
only android. tonemap. curve Red is used. CurveGreen and curveBlue are no-ops.
In Android API level 28,
To support the legacy API to ICameraDevice 3.
- The device supports PRIVATE_
REPROCESSING capability - The device's maximal JPEG resolution can reach 30 FPS min frame duration
- The device does not support HAL based ZSL (android.
control. enable Zsl)
For devices which support SYSTEM_
Hidden physical camera ids[1] must not be be shared[2] between public camera devices
and camera devices advertising SYSTEM_
[1] - Camera device ids which are advertised in the
ANDROID_
[2] - The ANDROID_
A list of all keys that the camera device has available
to use with CaptureRequest.
3.
Attempting to set a key into a CaptureRequest that is not
listed here will result in an invalid request and will be rejected
by the camera device.
This field can be used to query the feature set of a camera device
at a more granular level than capabilities.
Vendor tags can be listed here.
Setting/
The HAL must not consume any request tags that are not listed either
here or in the vendor tag list.
The public camera2 API will always make the vendor tags visible
via
CameraCharacteristics#getAvailableCaptureRequestKeys.
A list of all keys that the camera device has available to use with CaptureResult.
3.
Attempting to get a key from a CaptureResult that is not
listed here will always return a null value.null
value.
The following keys may return null unless they are enabled:
- android.
statistics. lens Shading Map (non-null iff android. statistics. lens Shading Map Mode == ON)
(Those sometimes-null keys will nevertheless be listed here
if they are available.
This field can be used to query the feature set of a camera device
at a more granular level than capabilities.
Tags listed here must always have an entry in the result metadata,
Vendor tags can be listed here.
Setting/
The HAL must not produce any result tags that are not listed either
here or in the vendor tag list.
The public camera2 API will always make the vendor tags visible via CameraCharacteristics#getAvailableCaptureResultKeys.
A list of all keys that the camera device has available to use with CameraCharacteristics.
3.
This entry follows the same rules as
android.
Keys listed here must always have an entry in the static info metadata,
Vendor tags can listed here.
Setting/
The HAL must not have any tags in its static info that are not listed
either here or in the vendor tag list.
The public camera2 API will always make the vendor tags visible
via CameraCharacteristics#getKeys.
A subset of the available request keys that the camera device
can pass as part of the capture session initialization.
3.
This is a subset of android.
- The camera client starts by querying the session parameter key list via
CameraCharacteristics#getAvailableSessionKeys.
- Before triggering the capture session create sequence,
a capture request must be built via CameraDevice#createCaptureRequest using an appropriate template matching the particular use case. - The client should go over the list of session parameters and check
whether some of the keys listed matches with the parameters that
they intend to modify as part of the first capture request.
- If there is no such match,
the capture request can be passed unmodified to SessionConfiguration#setSessionParameters. - If matches do exist,
the client should update the respective values and pass the request to SessionConfiguration#setSessionParameters. - After the capture session initialization completes the session parameter
key list can continue to serve as reference when posting or updating
further requests.
As mentioned above further changes to session parameters should ideally be avoided, if updates are necessary however clients could expect a delay/ glitch during the parameter switch.
If android.
Setting/
The HAL must not consume any request tags in the session parameters that
are not listed either here or in the vendor tag list.
The public camera2 API will always make the vendor tags visible
via
CameraCharacteristics#getAvailableSessionKeys.
A subset of the available request keys that can be overridden for
physical devices backing a logical multi-camera.
3.
This is a subset of android.
Vendor tags can be listed here.
Setting/
The HAL must not consume any request tags in the session parameters that
are not listed either here or in the vendor tag list.
There should be no overlap between this set of keys and the available session keys
CameraCharacteristics#getAvailableSessionKeys along
with any other controls that can have impact on the dual-camera sync.
The public camera2 API will always make the vendor tags visible
via
CameraCharacteristics#getAvailablePhysicalCameraRequestKeys.
A list of camera characteristics keys that are only available
in case the camera client has camera permission.
3.
The entry contains a subset of
CameraCharacteristics#getKeys that require camera clients
to acquire the permission#CAMERA permission before calling
CameraManager#getCameraCharacteristics.
Do not set this property directly,
Devices supporting the 10-bit output capability
Camera
3.
Camera clients can retrieve the list of supported 10-bit dynamic range profiles by calling
DynamicRangeProfiles#getSupportedProfiles.
-
STANDARD (v3.8)
0x1
8-bit SDR profile which is the default for all non 10-bit output capable devices.
-
HLG10 (v3.8)
0x2
10-bit pixel samples encoded using the Hybrid log-gamma transfer function.
-
HDR10 (v3.8)
0x4
10-bit pixel samples encoded using the SMPTE ST 2084 transfer function.
This profile utilizes internal static metadata to increase the quality of the capture. -
HDR10_PLUS (v3.8)
0x8
10-bit pixel samples encoded using the SMPTE ST 2084 transfer function.
In contrast to HDR10, this profile uses internal per-frame metadata to further enhance the quality of the capture. -
DOLBY_VISION_10B_HDR_REF (v3.8)
0x10
This is a camera mode for Dolby Vision capture optimized for a more scene accurate capture.
This would typically differ from what a specific device might want to tune for a consumer optimized Dolby Vision general capture. -
DOLBY_VISION_10B_HDR_REF_PO (v3.8)
0x20
This is the power optimized mode for 10-bit Dolby Vision HDR Reference Mode.
-
DOLBY_VISION_10B_HDR_OEM (v3.8)
0x40
This is the camera mode for the default Dolby Vision capture mode for the specific device.
This would be tuned by each specific device for consumer pleasing results that resonate with their particular audience. We expect that each specific device would have a different look for their default Dolby Vision capture. -
DOLBY_VISION_10B_HDR_OEM_PO (v3.8)
0x80
This is the power optimized mode for 10-bit Dolby Vision HDR device specific capture Mode.
-
DOLBY_VISION_8B_HDR_REF (v3.8)
0x100
This is the 8-bit version of the Dolby Vision reference capture mode optimized for scene accuracy.
-
DOLBY_VISION_8B_HDR_REF_PO (v3.8)
0x200
This is the power optimized mode for 8-bit Dolby Vision HDR Reference Mode.
-
DOLBY_VISION_8B_HDR_OEM (v3.8)
0x400
This is the 8-bit version of device specific tuned and optimized Dolby Vision capture mode.
-
DOLBY_VISION_8B_HDR_OEM_PO (v3.8)
0x800
This is the power optimized mode for 8-bit Dolby Vision HDR device specific capture Mode.
- MAX (v3.8) 0x1000
A map of all available 10-bit dynamic range profiles along with their
capture request constraints.
3.
Devices supporting the 10-bit output capability
Camera
The array contains three entries per supported profile:
1) The supported dynamic profile value.
For example if we assume that a device exists that can only support HLG10,
Camera providers must ensure that each processed buffer from a stream configured with the
HDR10 dynamic range profile includes SMPTE ST 2086 static metadata by calling
'android::hardware::graphics::mapper::V4_
Camera providers must ensure that each processed buffer from a stream configured
with HDR10_
Camera providers must ensure that each processed buffer from a stream configured
with any of the 10-bit Dolby Vision dynamic range profiles includes SMPTE ST 2094-10
dynamic metadata by calling 'android::hardware::graphics::mapper::V4_
Recommended 10-bit dynamic range profile.
3.
Devices supporting the 10-bit output capability
Camera
A frame counter set by the framework.
Deprecated. Do not use.
> 0
3.
Reset on release()
An application-specified ID for the current
request.
Any int
3.
-
NONE (v3.2)
No metadata should be produced on output,
except for application-bound buffer data. If no application-bound streams exist, no frame should be placed in the output frame queue. If such streams exist, a frame should be placed on the output queue with null metadata but with the necessary output buffer information. Timestamp information should still be included with any output stream buffers -
FULL (v3.2)
All metadata should be produced.
Statistics will only be produced if they are separately enabled
How much metadata to produce on output
3.
Lists which camera output streams image data from this capture must be sent to
Deprecated. Do not use.
List must only include streams that have been created
3.
If no output streams are listed,
Specifies the number of pipeline stages the frame went
through from when it was exposed to when the final completed result
was available to the framework.
3.
Depending on what settings are used in the request,
See android.
This value must always represent the accurate count of how many
pipeline stages were actually used.
The desired region of the sensor to read out for this capture.
3.
This control can be used to implement digital zoom.
For devices not supporting android.(0, being
the top-left pixel of the active array.
For devices supporting android.(0, being the top-left pixel of the pre-correction active array.(0, being the top-left pixel of the
active array.
Output streams use this rectangle to produce their output,
The crop region is applied after the RAW to other color space (e.
For non-raw streams,
For example,
Conversely,
To illustrate,(2000,.== FREEFORM),
- Camera Configuration:
- Active array size:
2000x1500(3 MP,4:3 aspect ratio) - Output stream #1:
640x480(VGA,4:3 aspect ratio) - Output stream #2:
1280x720(720p,16:9 aspect ratio)
- Active array size:
- Case #1: 4:3 crop region with 2x digital zoom
- Crop region:
Rect(500,375, 1500, 1125) // (left, top, right, bottom) 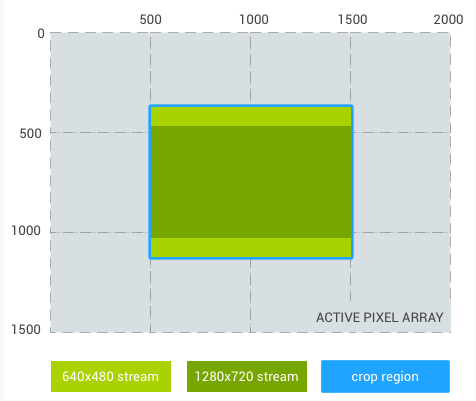
640x480stream source area:(500,(equal to crop region)375, 1500, 1125) 1280x720stream source area:(500,(letterboxed)469, 1500, 1031)
- Crop region:
- Case #2: 16:9 crop region with ~1.
5x digital zoom. - Crop region:
Rect(500,375, 1833, 1125) 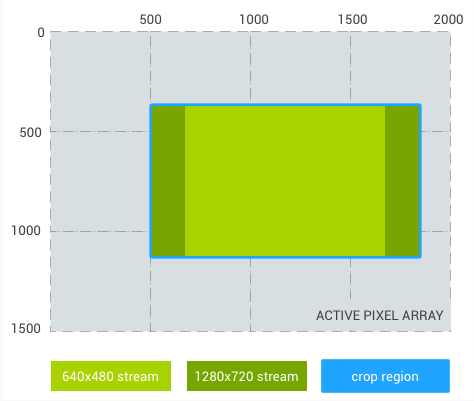
640x480stream source area:(666,(pillarboxed)375, 1666, 1125) 1280x720stream source area:(500,(equal to crop region)375, 1833, 1125)
- Crop region:
- Case #3: 1:1 crop region with ~2.
6x digital zoom. - Crop region:
Rect(500,375, 1250, 1125) 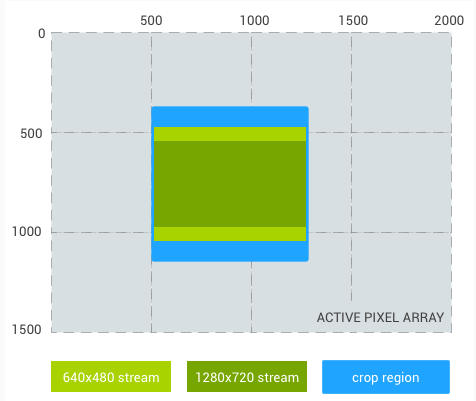
640x480stream source area:(500,(letterboxed)469, 1250, 1031) 1280x720stream source area:(500,(letterboxed)543, 1250, 957)
- Crop region:
- Case #4: Replace
640x480stream with1024x1024stream,with 4:3 crop region: - Crop region:
Rect(500,375, 1500, 1125) 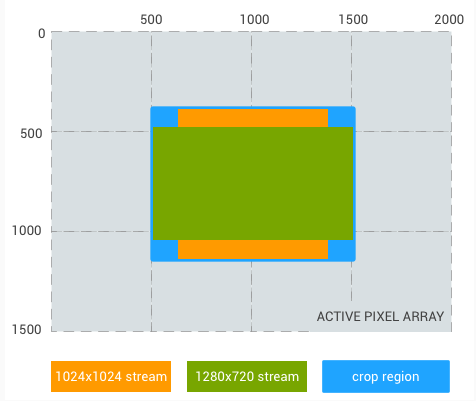
1024x1024stream source area:(625,(pillarboxed)375, 1375, 1125) 1280x720stream source area:(500,(letterboxed)469, 1500, 1031) - Note that in this case,
neither of the two outputs is a subset of the other, with each containing image data the other doesn't have.
- Crop region:
If the coordinate system is android.floor( activeArraySize. and
floor( activeArraySize.,
If the coordinate system is android.floor( preCorrectionActiveArraySize.
and
floor( preCorrectionActiveArraySize.,
The camera device may adjust the crop region to account for rounding and other hardware
requirements; the final crop region used will be included in the output capture result.
The camera sensor output aspect ratio depends on factors such as output stream
combination and android.
Starting from API level 30,
For camera devices with the
Camera
The output streams must maintain square pixels at all
times,
If android.
HAL2.
-
NONE (v3.5)
No rotate and crop is applied.
Processed outputs are in the sensor orientation. -
90 (v3.5)
Processed images are rotated by 90 degrees clockwise,
and then cropped to the original aspect ratio. -
180 (v3.5)
Processed images are rotated by 180 degrees.
Since the aspect ratio does not change, no cropping is performed. -
270 (v3.5)
Processed images are rotated by 270 degrees clockwise,
and then cropped to the original aspect ratio. -
AUTO (v3.5)
The camera API automatically selects the best concrete value for rotate-and-crop based on the application's support for resizability and the current multi-window mode.
If the application does not support resizing but the display mode for its main Activity is not in a typical orientation,
the camera API will set ROTATE_or some other supported rotation value,AND_ CROP_ 90 depending on device configuration, to ensure preview and captured images are correctly shown to the user. Otherwise, ROTATE_will be selected.AND_ CROP_ NONE When a value other than NONE is selected,
several metadata fields will also be parsed differently to ensure that coordinates are correctly handled for features like drawing face detection boxes or passing in tap-to-focus coordinates. The camera API will convert positions in the active array coordinate system to/ from the cropped-and-rotated coordinate system to make the operation transparent for applications. No coordinate mapping will be done when the application selects a non-AUTO mode.
Whether a rotation-and-crop operation is applied to processed
outputs from the camera.
3.
This control is primarily intended to help camera applications with no support for
multi-window modes to work correctly on devices where multi-window scenarios are
unavoidable,
If supported,ROTATE_,ROTATE_ and ROTATE_ will always be available if this control
is supported by the device.ROTATE_.
When CROP_ is in use,
- android.
control. ae Regions - android.
control. af Regions - android.
control. awb Regions - android.
statistics. faces
Capture results will contain the actual value selected by the API;
ROTATE_ will never be seen in a capture result.
Applications can also select their preferred cropping mode,
Cropping and rotating is done after the application of digital zoom (via either
android.
When CROP_ or CROP_ are selected,CROP_ will still
produce 1600x1200 output,w:h,(h/ of the field of view visible.
As a visual example,ROTATE_ on the
outputs for the following parameters:
- Sensor active array:
2000x1500 - Crop region: top-left:
(500,,375) size: (1000,(4:3 aspect ratio)750) - Output streams: YUV
640x480and YUV1280x720 ROTATE_AND_ CROP_ 90
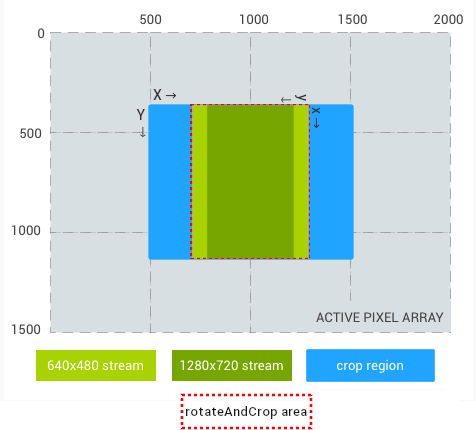
With these settings,
- 640x480 stream crop: top-left:
(219,,375) size: (562,750) - 1280x720 stream crop: top-left:
(289,,375) size: (422,750)
Since the buffers are rotated,
- 640x480 stream: top-left:
(781,on active array,375) size: (640,,480) downscaled 1. 17x from sensor pixels - 1280x720 stream: top-left:
(711,on active array,375) size: (1280,,720) upscaled 1. 71x from sensor pixels
ROTATE_
The HAL also does not need to consider coordinate transforms for ROTATE_
-
FALSE (v3.2)
Crop region (android.
scaler. crop Region) has not been set by the camera client. -
TRUE (v3.2)
Scaler crop regions (android.
scaler. crop Region) has been set by the camera client.
Framework-only private key which informs camera fwk that the scaler crop region
(android.
3.
This must be set to TRUE by the camera2 java fwk when the camera client sets
android.
-
RAW16 (v3.2)
[optional]
0x20
RAW16 is a standard,
cross-platform format for raw image buffers with 16-bit pixels. Buffers of this format are typically expected to have a Color Filter Array (CFA) layout,
which is given in android. sensor. info. color Filter Arrangement. Sensors with CFAs that are not representable by a format in android. sensor. info. color Filter Arrangement should not use this format. Buffers of this format will also follow the constraints given for RAW_
OPAQUE buffers, but with relaxed performance constraints. This format is intended to give users access to the full contents of the buffers coming directly from the image sensor prior to any cropping or scaling operations,
and all coordinate systems for metadata used for this format are relative to the size of the active region of the image sensor before any geometric distortion correction has been applied (i. e. android. sensor. info. pre Correction Active Array Size). Supported dimensions for this format are limited to the full dimensions of the sensor (e. g. either android. sensor. info. pixel Array Size or android. sensor. info. pre Correction Active Array Size will be the only supported output size). See android.
scaler. available Input Output Formats Map for the full set of performance guarantees. -
RAW_OPAQUE (v3.2)
[optional]
0x24
RAW_
OPAQUE (or RAW_ PRIVATE as referred in public API) is a format for raw image buffers coming from an image sensor. The actual structure of buffers of this format is platform-specific,
but must follow several constraints: - No image post-processing operations may have been applied to
buffers of this type.
These buffers contain raw image data coming directly from the image sensor. - If a buffer of this format is passed to the camera device for
reprocessing,
the resulting images will be identical to the images produced if the buffer had come directly from the sensor and was processed with the same settings.
The intended use for this format is to allow access to the native raw format buffers coming directly from the camera sensor without any additional conversions or decrease in framerate.
See android.
scaler. available Input Output Formats Map for the full set of performance guarantees. - No image post-processing operations may have been applied to
buffers of this type.
-
YV12 (v3.2)
[optional]
0x32315659
YCrCb 4:2:0 Planar
-
YCrCb_420_SP (v3.2)
[optional]
0x11
NV21
-
IMPLEMENTATION_DEFINED (v3.2)
0x22
System internal format,
not application-accessible -
YCbCr_420_888 (v3.2)
0x23
Flexible YUV420 Format
-
BLOB (v3.2)
0x21
JPEG format
-
RAW10 (v3.4)
0x25
RAW10
-
RAW12 (v3.4)
0x26
RAW12
-
Y8 (v3.4)
0x20203859
Y8
The list of image formats that are supported by this
camera device for output streams.
Deprecated. Do not use.
3.
All camera devices will support JPEG and YUV_
When set to YUV_
These format values are from HAL_
When IMPLEMENTATION_
YCb
The BLOB format must be supported by the HAL.
A RAW_
The minimum frame duration that is supported
for each resolution in android.
Deprecated. Do not use.
TODO: Remove property.
3.
This corresponds to the minimum steady-state frame duration when only
that JPEG stream is active and captured in a burst,
When multiple streams are configured,
The JPEG resolutions that are supported by this camera device.
Deprecated. Do not use.
TODO: Remove property.
3.
The resolutions are listed as (width, pairs.
The HAL must include sensor maximum resolution
(defined by android.
The maximum ratio between both active area width
and crop region width,
>=1
3.
This represents the maximum amount of zooming possible by
the camera device,
Crop regions that have a width or height that is smaller
than this ratio allows will be rounded up to the minimum
allowed size by the camera device.
Starting from API level 30,
If the HAL supports android.
For each available processed output size (defined in
android.
Deprecated. Do not use.
3.
This should correspond to the frame duration when only that processed
stream is active,
When multiple streams are configured,
The resolutions available for use with
processed output streams,
Deprecated. Do not use.
3.
The resolutions are listed as (width, pairs.
For a given use case,
Please reference the documentation for the image data destination to
check if it limits the maximum size for image data.
For FULL capability devices (android.),
- 240p (320 x 240)
- 480p (640 x 480)
- 720p (1280 x 720)
- 1080p (1920 x 1080)
For LIMITED capability devices (android.),
For each available raw output size (defined in
android.
Deprecated. Do not use.
3.
Should correspond to the frame duration when only the raw stream is
active.
When multiple streams are configured,
The resolutions available for use with raw
sensor output streams,
Deprecated. Do not use.
3.
The mapping of image formats that are supported by this
camera device for input streams,
3.
All camera devices with at least 1
android.
The camera device will support the following map of formats,
| Input Format | Output Format | Capability |
|---|---|---|
| ImageFormat#PRIVATE | ImageFormat#JPEG | PRIVATE_ |
| ImageFormat#PRIVATE | Image |
PRIVATE_ |
| Image |
ImageFormat#JPEG | YUV_ |
| Image |
Image |
YUV_ |
PRIVATE refers to a device-internal format that is not directly application-visible.
For a PRIVATE_
Attempting to configure an input stream with output streams not
listed as available in this map is not valid.
Additionally,
| Input Format | Output Format | Capability |
|---|---|---|
| ImageFormat#PRIVATE | ImageFormat#Y8 | PRIVATE_ |
| ImageFormat#Y8 | ImageFormat#JPEG | YUV_ |
| ImageFormat#Y8 | ImageFormat#Y8 | YUV_ |
For the formats,system/ for a
definition of the image format enumerations.
This value is encoded as a variable-size array-of-arrays.[format, where
... has length elements.
A code sample to read/
//If the HAL claims to support any of the capabilities listed in the
above details,
- OUTPUT (v3.2)
- INPUT (v3.2)
The available stream configurations that this
camera device supports
(i.
3.
The configurations are listed as (format,
tuples.
For a given use case,
Please reference the documentation for the image data destination to
check if it limits the maximum size for image data.
Not all output formats may be supported in a configuration with
an input stream of a particular format.
For applications targeting SDK version older than 31,
| Format | Size | Hardware Level | Notes |
|---|---|---|---|
| JPEG | android. |
Any | |
| JPEG | 1920x1080 (1080p) | Any | if 1080p <= activeArraySize |
| JPEG | 1280x720 (720) | Any | if 720p <= activeArraySize |
| JPEG | 640x480 (480p) | Any | if 480p <= activeArraySize |
| JPEG | 320x240 (240p) | Any | if 240p <= activeArraySize |
| YUV_ |
all output sizes available for JPEG | FULL | |
| YUV_ |
all output sizes available for JPEG, |
LIMITED | |
| IMPLEMENTATION_ |
same as YUV_ |
Any |
For applications targeting SDK version 31 or newer,
| Format | Size | Hardware Level | Notes |
|---|---|---|---|
| JPEG | android. |
Any | |
| JPEG | 1920x1080 (1080p) | Any | if 1080p <= activeArraySize |
| YUV_ |
android. |
FULL | |
| YUV_ |
1920x1080 (1080p) | FULL | if 1080p <= activeArraySize |
| YUV_ |
1280x720 (720) | FULL | if 720p <= activeArraySize |
| YUV_ |
640x480 (480p) | FULL | if 480p <= activeArraySize |
| YUV_ |
320x240 (240p) | FULL | if 240p <= activeArraySize |
| YUV_ |
all output sizes available for FULL hardware level, |
LIMITED | |
| IMPLEMENTATION_ |
same as YUV_ |
Any |
For applications targeting SDK version 31 or newer,
Refer to android.
Exception on 176x144 (QCIF) resolution: camera devices usually have a fixed capability for
downscaling from larger resolution to smaller,
It is recommended (but not mandatory) to also include half/
(The following is a rewording of the above required table):
For JPEG format,
- The HAL may choose the aspect ratio of each Jpeg size to be one of well known ones
(e.
g. 4:3, 16:9, 3:2 etc. ). If the sensor maximum resolution (defined by android. sensor. info. active Array Size) has an aspect ratio other than these, it does not have to be included in the supported JPEG sizes. - Some hardware JPEG encoders may have pixel boundary alignment requirements,
such as the dimensions being a multiple of 16.
Therefore,
For FULL capability devices (android.),
It must also include each below resolution if it is smaller than or
equal to the sensor maximum resolution (for both YUV_
- 240p (320 x 240)
- 480p (640 x 480)
- 720p (1280 x 720)
- 1080p (1920 x 1080)
Note that for primary cameras (first rear/
For LIMITED capability devices
(android.),
Regardless of hardware level,
This supersedes the following fields,
- availableFormats
- available[Processed,
Raw, Jpeg]Sizes
This lists the minimum frame duration for each
format/
3.
This should correspond to the frame duration when only that
stream is active,
When multiple streams are used in a request,
See android.
This lists the maximum stall duration for each
output format/
3.
A stall duration is how much extra time would get added
to the normal minimum frame duration for a repeating request
that has streams with non-zero stall.
For example,
- JPEG streams act like processed YUV streams in requests for which
they are not included; in requests in which they are directly
referenced,
they act as JPEG streams. This is because supporting a JPEG stream requires the underlying YUV data to always be ready for use by a JPEG encoder, but the encoder will only be used (and impact frame duration) on requests that actually reference a JPEG stream. - The JPEG processor can run concurrently to the rest of the camera
pipeline,
but cannot process more than 1 capture at a time.
In other words,
In general,
Submitting a repeating request with streams (call this S)
is the same as setting the minimum frame duration from
the normal minimum frame duration corresponding to S,S.
If interleaving requests with and without a stall duration,
This means that a stalling request will not have an exposure start
until the stall has completed.
This should correspond to the stall duration when only that stream is
active,
The following formats may always have a stall duration:
The following formats will never have a stall duration:
All other formats may or may not have an allowed stall duration on
a per-capability basis; refer to android.
See android.
If possible,
The available stream configurations that this
camera device supports; also includes the minimum frame durations
and the stall durations for each format/
3.
All camera devices will support sensor maximum resolution (defined by
android.
For a given use case,
Please reference the documentation for the image data destination to
check if it limits the maximum size for image data.
For applications targeting SDK version older than 31,
| Format | Size | Hardware Level | Notes |
|---|---|---|---|
| ImageFormat#JPEG | android. |
Any | |
| ImageFormat#JPEG | 1920x1080 (1080p) | Any | if 1080p <= activeArraySize |
| ImageFormat#JPEG | 1280x720 (720p) | Any | if 720p <= activeArraySize |
| ImageFormat#JPEG | 640x480 (480p) | Any | if 480p <= activeArraySize |
| ImageFormat#JPEG | 320x240 (240p) | Any | if 240p <= activeArraySize |
| Image |
all output sizes available for JPEG | FULL | |
| Image |
all output sizes available for JPEG, |
LIMITED | |
| ImageFormat#PRIVATE | same as YUV_ |
Any |
For applications targeting SDK version 31 or newer,
| Format | Size | Hardware Level | Notes |
|---|---|---|---|
| ImageFormat#JPEG | android. |
Any | |
| ImageFormat#JPEG | 1920x1080 (1080p) | Any | if 1080p <= activeArraySize |
| Image |
android. |
FULL | |
| Image |
1920x1080 (1080p) | FULL | if 1080p <= activeArraySize |
| Image |
1280x720 (720) | FULL | if 720p <= activeArraySize |
| Image |
640x480 (480p) | FULL | if 480p <= activeArraySize |
| Image |
320x240 (240p) | FULL | if 240p <= activeArraySize |
| Image |
all output sizes available for FULL hardware level, |
LIMITED | |
| ImageFormat#PRIVATE | same as YUV_ |
Any |
For applications targeting SDK version 31 or newer,
Refer to android.
*1: For JPEG format,
- The HAL may choose the aspect ratio of each Jpeg size to be one of well known ones
(e.
g. 4:3, 16:9, 3:2 etc. ). If the sensor maximum resolution (defined by android. sensor. info. active Array Size) has an aspect ratio other than these, it does not have to be included in the supported JPEG sizes. - Some hardware JPEG encoders may have pixel boundary alignment requirements,
such as the dimensions being a multiple of 16. Therefore, the maximum JPEG size may be smaller than sensor maximum resolution. However, the largest JPEG size will be as close as possible to the sensor maximum resolution given above constraints. It is required that after aspect ratio adjustments, additional size reduction due to other issues must be less than 3% in area. For example, if the sensor maximum resolution is 3280x2464, if the maximum JPEG size has aspect ratio 4:3, and the JPEG encoder alignment requirement is 16, the maximum JPEG size will be 3264x2448.
Exception on 176x144 (QCIF) resolution: camera devices usually have a fixed capability on
downscaling from larger resolution to smaller ones,
Do not set this property directly
(it is synthetic and will not be available at the HAL layer);
set the android.
Not all output formats may be supported in a configuration with
an input stream of a particular format.
It is recommended (but not mandatory) to also include half/
(The following is a rewording of the above required table):
The HAL must include sensor maximum resolution (defined by
android.
For FULL capability devices (android.),
It must also include each below resolution if it is smaller than or
equal to the sensor maximum resolution (for both YUV_
- 240p (320 x 240)
- 480p (640 x 480)
- 720p (1280 x 720)
- 1080p (1920 x 1080)
Note that for Performance Class 12 or higher primary cameras (first rear/
For LIMITED capability devices
(android.),
Regardless of hardware level,
This supersedes the following fields,
- availableFormats
- available[Processed,
Raw, Jpeg]Sizes
-
CENTER_ONLY (v3.2)
The camera device only supports centered crop regions.
-
FREEFORM (v3.2)
The camera device supports arbitrarily chosen crop regions.
The crop type that this camera device supports.
3.
When passing a non-centered crop region (android.
Camera devices that support FREEFORM cropping will support any crop region that
is inside of the active array.
Starting from API level 30,
- If the camera device supports FREEFORM cropping,
in order to do FREEFORM cropping, the application must set android. control. zoom Ratio to 1. 0, and use android. scaler. crop Region for zoom. - To do CENTER_
ONLY zoom, the application has below 2 options: - Set android.
control. zoom Ratio to 1. 0; adjust zoom by android. scaler. crop Region. - Adjust zoom by android.
control. zoom Ratio; use android. scaler. crop Region to crop the field of view vertically (letterboxing) or horizontally (pillarboxing), but not windowboxing.
- Set android.
- Setting android.
control. zoom Ratio to values different than 1. 0 and android. scaler. crop Region to be windowboxing at the same time are not supported. In this case, the camera framework will override the android. scaler. crop Region to be the active array.
LEGACY capability devices will only support CENTER_
If the HAL supports android.
-
PREVIEW (v3.4)
0x0
Preview must only include non-stalling processed stream configurations with output formats like Image
Format#YUV_ 420_ 888, ImageFormat#PRIVATE, etc. -
RECORD (v3.4)
0x1
Video record must include stream configurations that match the advertised supported media profiles CamcorderProfile with IMPLEMENTATION_
DEFINED format. -
VIDEO_SNAPSHOT (v3.4)
0x2
Video snapshot must include stream configurations at least as big as the maximum RECORD resolutions and only with JPEG output format.
Additionally the configurations shouldn't cause preview glitches and also be able to run at 30 fps. -
SNAPSHOT (v3.4)
0x3
Recommended snapshot stream configurations must include at least one with size close to android.
sensor. info. active Array Size and JPEG output format. Taking into account restrictions on aspect ratio, alignment etc. the area of the maximum suggested size shouldn’t be less than 97% of the sensor array size area. -
ZSL (v3.4)
0x4
If supported,
recommended input stream configurations must only be advertised with ZSL along with other processed and/ or stalling output formats. -
RAW (v3.4)
0x5
If supported,
recommended raw stream configurations must only include RAW based output formats. -
LOW_LATENCY_SNAPSHOT (v3.4)
0x6
If supported,
the recommended low latency stream configurations must have end-to-end latency that does not exceed 200 ms. under standard operating conditions (reasonable light levels, not loaded system) and using template TEMPLATE_ STILL_ CAPTURE. This is primarily for listing configurations for the JPEG output format however other supported output formats can be added as well. - PUBLIC_END (v3.4) 0x7
-
10BIT_OUTPUT (v3.8)
0x8
If supported,
the recommended 10-bit output stream configurations must include a subset of the advertised ImageFormat#YCBCR_ P010 and ImageFormat#PRIVATE outputs that are optimized for power and performance when registered along with a supported 10-bit dynamic range profile. see android. hardware. camera2. params. Output Configuration#set Dynamic Range Profile for details. - PUBLIC_END_3_8 (v3.8) 0x9
-
VENDOR_START (v3.4)
0x18
Vendor defined use cases.
These depend on the vendor implementation.
Recommended stream configurations for common client use cases.
3.
Optional subset of the android.
There are some requirements that need to be considered regarding the usecases and the suggested configurations:
- If android.
scaler. available Recommended Stream Configurations is set, then recommended stream configurations must be present for all mandatory usecases PREVIEW, SNAPSHOT, RECORD, VIDEO_ SNAPSHOT. ZSL and RAW are required depending on device capabilities see android. request. available Capabilities. - Non-existing usecases and non-vendor usecases within the range
(RAW : VENDOR_
START] are prohibited as well as stream configurations not present in the exhaustive android. scaler. available Stream Configurations list.
For example,
[3840,
1920,
Recommended mappings of image formats that are supported by this
camera device for input streams,
3.
This is a recommended subset of the complete list of mappings found in
android.
For a code sample of the required data encoding please check
android.
An array of mandatory stream combinations generated according to the camera device
Camera
3.
The array of
combinations is
generated according to the documented
guideline based on
specific device level and capabilities.
Do not set this property directly
(it is synthetic and will not be available at the HAL layer).
An array of mandatory concurrent stream combinations.
3.
The array of
combinations is
generated according to the documented
guideline for each
device which has its Id present in the set returned by
CameraManager#getConcurrentCameraIds.
Do not set this property directly
(it is synthetic and will not be available at the HAL layer).
List of rotate-and-crop modes for android.
Any value listed in android.
3.
This entry lists the valid modes for android.
Starting with API level 30,ROTATE_.ROTATE_ and ROTATE_.
Default YUV/
3.
This entry lists the default size supported in the secure camera mode.
When the key is present,
If this key returns null on a device with SECURE_
- OUTPUT (v3.6)
- INPUT (v3.6)
The available multi-resolution stream configurations that this
physical camera device supports
(i.
3.
This list contains a subset of the parent logical camera's multi-resolution stream
configurations which belong to this physical camera,
If this camera device isn't a physical camera device constituting a logical camera,
This field will only be advertised if the device is a physical camera of a
logical multi-camera device or an ultra high resolution sensor camera.
If this field contains input stream configurations,
The multi-resolution stream configurations supported by this logical camera
or ultra high resolution sensor camera device.
3.
Multi-resolution streams can be used by a LOGICAL_
- For a logical multi-camera implementing optical zoom,
at different zoom level, a different physical camera may be active, resulting in different full-resolution image sizes. - For an ultra high resolution camera,
depending on whether the camera operates in default mode, or maximum resolution mode, the output full-size images may be of either binned resolution or maximum resolution.
To use multi-resolution output streams,
If a camera device supports multi-resolution output streams for a particular format,
To use multi-resolution input streams,
If a camera device supports multi-resolution {@code YUV} input and multi-resolution
{@code YUV} output,
Do not set this property directly
(it is synthetic and will not be available at the HAL layer).
- OUTPUT (v3.6)
- INPUT (v3.6)
The available stream configurations that this
camera device supports (i.
3.
Analogous to android.
Not all output formats may be supported in a configuration with
an input stream of a particular format.
Refer to hal_
This lists the minimum frame duration for each
format/
3.
Analogous to android.
When multiple streams are used in a request (if supported,
See android.
This lists the maximum stall duration for each
output format/
3.
Analogous to android.
If possible,
The available stream configurations that this
camera device supports when given a CaptureRequest with android.
3.
Analogous to android.
Do not set this property directly
(it is synthetic and will not be available at the HAL layer);
set the android.
Not all output formats may be supported in a configuration with
an input stream of a particular format.
The mapping of image formats that are supported by this
camera device for input streams,
3.
Analogous to android.
Refer to hal details for android.
An array of mandatory stream combinations which are applicable when
CaptureRequest has android.
3.
The array of
combinations is
generated according to the documented
guideline for each
device which has the
Camera
Do not set this property directly
(it is synthetic and will not be available at the HAL layer).
An array of mandatory stream combinations which are applicable when device support the
10-bit output capability
Camera
3.
The array of
combinations is
generated according to the documented
guideline for each
device which has the
Camera
Do not set this property directly
(it is synthetic and will not be available at the HAL layer).
An array of mandatory stream combinations which are applicable when device lists
{@code PREVIEW_
3.
The array of
combinations is
generated according to the documented
guideline for each
device which supports {@code PREVIEW_
Do not set this property directly
(it is synthetic and will not be available at the HAL layer).
- FALSE (v3.6)
- TRUE (v3.6)
Whether the camera device supports multi-resolution input or output streams
3.
A logical multi-camera or an ultra high resolution camera may support multi-resolution
input or output streams.
When set to TRUE:
- For a logical multi-camera,
the camera framework derives android. scaler. multi Resolution Stream Configuration Map by combining the android. scaler. physical Camera Multi Resolution Stream Configurations from its physical cameras. - For an ultra-high resolution sensor camera,
the camera framework directly copies the value of android. scaler. physical Camera Multi Resolution Stream Configurations to android. scaler. multi Resolution Stream Configuration Map.
For the HAL to claim support for multi-resolution streams:
- The HAL must support the buffer management API by setting
supportedBufferManagementVersion to HIDL_
DEVICE_ 3_ 5. - For a logical multi-camera,
when combined from all its physical cameras, there must be at a minimum one input or output stream format with at least two different physicalCameraMultiResolutionStreamConfigurations entries for that format. - For an ultra high resolution sensor camera,
for each supported multi-resolution format, the physicalCameraMultiResolutionStreamConfigurations must contain both the largest stream configuration within the android. scaler. stream Configuration Map and the largest stream configuration within the android. scaler. stream Configuration Map Maximum Resolution. - If the HAL advertises multi-resolution input stream support for a particular format
(namely PRIVATE,
or YUV), the logical multi-camera or ultra high resolution sensor camera must have the corresponding reprocessing capabilities (PRIVATE_ REPROCESSING, or YUV_ REPROCESSING respectively). The camera HAL must support reprocessing the multi-resolution input stream to the output formats specified in the camera's android. scaler. available Input Output Formats Map.
-
DEFAULT (v3.8)
[optional]
0x0
Default stream use case.
This use case is the same as when the application doesn't set any use case for the stream.
The camera device uses the properties of the output target, such as format, dataSpace, or surface class type, to optimize the image processing pipeline. -
PREVIEW (v3.8)
[optional]
0x1
Live stream shown to the user.
Optimized for performance and usability as a viewfinder,
but not necessarily for image quality. The output is not meant to be persisted as saved images or video. No stall if android.
control. * are set to FAST. There may be stall if they are set to HIGH_ QUALITY. This use case has the same behavior as the default SurfaceView and SurfaceTexture targets. Additionally, this use case can be used for in-app image analysis. -
STILL_CAPTURE (v3.8)
[optional]
0x2
Still photo capture.
Optimized for high-quality high-resolution capture,
and not expected to maintain preview-like frame rates. The stream may have stalls regardless of whether android.
control. * is HIGH_ QUALITY. This use case has the same behavior as the default JPEG and RAW related formats. -
VIDEO_RECORD (v3.8)
[optional]
0x3
Recording video clips.
Optimized for high-quality video capture,
including high-quality image stabilization if supported by the device and enabled by the application. As a result, may produce output frames with a substantial lag from real time, to allow for highest-quality stabilization or other processing. As such, such an output is not suitable for drawing to screen directly, and is expected to be persisted to disk or similar for later playback or processing. Only streams that set the VIDEO_ RECORD use case are guaranteed to have video stabilization applied when the video stabilization control is set to ON, as opposed to PREVIEW_ STABILIZATION. This use case has the same behavior as the default MediaRecorder and MediaCodec targets.
-
PREVIEW_VIDEO_STILL (v3.8)
[optional]
0x4
One single stream used for combined purposes of preview,
video, and still capture. For such multi-purpose streams,
the camera device aims to make the best tradeoff between the individual use cases. For example, the STILL_ CAPTURE use case by itself may have stalls for achieving best image quality. But if combined with PREVIEW and VIDEO_ RECORD, the camera device needs to trade off the additional image processing for speed so that preview and video recording aren't slowed down. Similarly,
VIDEO_ RECORD may produce frames with a substantial lag, but PREVIEW_ VIDEO_ STILL must have minimal output delay. This means that to enable video stabilization with this use case, the device must support and the app must select the PREVIEW_ STABILIZATION mode for video stabilization. -
VIDEO_CALL (v3.8)
[optional]
0x5
Long-running video call optimized for both power efficiency and video quality.
The camera sensor may run in a lower-resolution mode to reduce power consumption at the cost of some image and digital zoom quality.
Unlike VIDEO_ RECORD, VIDEO_ CALL outputs are expected to work in dark conditions, so are usually accompanied with variable frame rate settings to allow sufficient exposure time in low light. -
VENDOR_START (v3.8)
[optional]
[hidden]
0x10000
Vendor defined use cases.
These depend on the vendor implementation.
The stream use cases supported by this camera device.
3.
The stream use case indicates the purpose of a particular camera stream from
the end-user perspective.
With this flag,
The application sets the use case of a camera stream by calling
OutputConfiguration#setStreamUseCase.
A camera device with
Camera
- DEFAULT
- PREVIEW
- STILL_
CAPTURE - VIDEO_
RECORD - PREVIEW_
VIDEO_ STILL - VIDEO_
CALL
The guaranteed stream combinations related to stream use case for a camera device with
Camera
For stream combinations not covered by the stream use case mandatory lists,
The camera HAL must support DEFAULT stream use case to handle scenarios where the
application doesn't explicitly set a stream's use case flag,
An array of mandatory stream combinations with stream use cases.
3.
The array of
combinations is
generated according to the documented
guideline for a
camera device with
Camera
Do not set this property directly
(it is synthetic and will not be available at the HAL layer).
The desired region of the sensor to read out for this capture.
3.
This control can be used to implement digital zoom.
For devices not supporting android.(0, being
the top-left pixel of the active array.
For devices supporting android.(0, being the top-left pixel of the pre-correction active array.(0, being the top-left pixel of the
active array.
Output streams use this rectangle to produce their output,
The crop region is applied after the RAW to other color space (e.
For non-raw streams,
For example,
Conversely,
To illustrate,(2000,.== FREEFORM),
- Camera Configuration:
- Active array size:
2000x1500(3 MP,4:3 aspect ratio) - Output stream #1:
640x480(VGA,4:3 aspect ratio) - Output stream #2:
1280x720(720p,16:9 aspect ratio)
- Active array size:
- Case #1: 4:3 crop region with 2x digital zoom
- Crop region:
Rect(500,375, 1500, 1125) // (left, top, right, bottom) 640x480stream source area:(500,(equal to crop region)375, 1500, 1125) 1280x720stream source area:(500,(letterboxed)469, 1500, 1031)
- Crop region:
- Case #2: 16:9 crop region with ~1.
5x digital zoom. - Crop region:
Rect(500,375, 1833, 1125) 640x480stream source area:(666,(pillarboxed)375, 1666, 1125) 1280x720stream source area:(500,(equal to crop region)375, 1833, 1125)
- Crop region:
- Case #3: 1:1 crop region with ~2.
6x digital zoom. - Crop region:
Rect(500,375, 1250, 1125) 640x480stream source area:(500,(letterboxed)469, 1250, 1031) 1280x720stream source area:(500,(letterboxed)543, 1250, 957)
- Crop region:
- Case #4: Replace
640x480stream with1024x1024stream,with 4:3 crop region: - Crop region:
Rect(500,375, 1500, 1125) 1024x1024stream source area:(625,(pillarboxed)375, 1375, 1125) 1280x720stream source area:(500,(letterboxed)469, 1500, 1031) - Note that in this case,
neither of the two outputs is a subset of the other, with each containing image data the other doesn't have.
- Crop region:
If the coordinate system is android.floor( activeArraySize. and
floor( activeArraySize.,
If the coordinate system is android.floor( preCorrectionActiveArraySize.
and
floor( preCorrectionActiveArraySize.,
The camera device may adjust the crop region to account for rounding and other hardware
requirements; the final crop region used will be included in the output capture result.
The camera sensor output aspect ratio depends on factors such as output stream
combination and android.
Starting from API level 30,
For camera devices with the
Camera
The output streams must maintain square pixels at all
times,
If android.
HAL2.
-
NONE (v3.5)
No rotate and crop is applied.
Processed outputs are in the sensor orientation. -
90 (v3.5)
Processed images are rotated by 90 degrees clockwise,
and then cropped to the original aspect ratio. -
180 (v3.5)
Processed images are rotated by 180 degrees.
Since the aspect ratio does not change, no cropping is performed. -
270 (v3.5)
Processed images are rotated by 270 degrees clockwise,
and then cropped to the original aspect ratio. -
AUTO (v3.5)
The camera API automatically selects the best concrete value for rotate-and-crop based on the application's support for resizability and the current multi-window mode.
If the application does not support resizing but the display mode for its main Activity is not in a typical orientation,
the camera API will set ROTATE_or some other supported rotation value,AND_ CROP_ 90 depending on device configuration, to ensure preview and captured images are correctly shown to the user. Otherwise, ROTATE_will be selected.AND_ CROP_ NONE When a value other than NONE is selected,
several metadata fields will also be parsed differently to ensure that coordinates are correctly handled for features like drawing face detection boxes or passing in tap-to-focus coordinates. The camera API will convert positions in the active array coordinate system to/ from the cropped-and-rotated coordinate system to make the operation transparent for applications. No coordinate mapping will be done when the application selects a non-AUTO mode.
Whether a rotation-and-crop operation is applied to processed
outputs from the camera.
3.
This control is primarily intended to help camera applications with no support for
multi-window modes to work correctly on devices where multi-window scenarios are
unavoidable,
If supported,ROTATE_,ROTATE_ and ROTATE_ will always be available if this control
is supported by the device.ROTATE_.
When CROP_ is in use,
- android.
control. ae Regions - android.
control. af Regions - android.
control. awb Regions - android.
statistics. faces
Capture results will contain the actual value selected by the API;
ROTATE_ will never be seen in a capture result.
Applications can also select their preferred cropping mode,
Cropping and rotating is done after the application of digital zoom (via either
android.
When CROP_ or CROP_ are selected,CROP_ will still
produce 1600x1200 output,w:h,(h/ of the field of view visible.
As a visual example,ROTATE_ on the
outputs for the following parameters:
- Sensor active array:
2000x1500 - Crop region: top-left:
(500,,375) size: (1000,(4:3 aspect ratio)750) - Output streams: YUV
640x480and YUV1280x720 ROTATE_AND_ CROP_ 90
With these settings,
- 640x480 stream crop: top-left:
(219,,375) size: (562,750) - 1280x720 stream crop: top-left:
(289,,375) size: (422,750)
Since the buffers are rotated,
- 640x480 stream: top-left:
(781,on active array,375) size: (640,,480) downscaled 1. 17x from sensor pixels - 1280x720 stream: top-left:
(711,on active array,375) size: (1280,,720) upscaled 1. 71x from sensor pixels
ROTATE_
The HAL also does not need to consider coordinate transforms for ROTATE_
Duration each pixel is exposed to
light.
3.
If the sensor can't expose this exact duration,
This control is only effective if android.
Duration from start of frame exposure to
start of next frame exposure.
See android.max(duration,.
3.
The maximum frame rate that can be supported by a camera subsystem is a function of many factors:
- Requested resolutions of output image streams
- Availability of binning /
skipping modes on the imager - The bandwidth of the imager interface
- The bandwidth of the various ISP processing blocks
Since these factors can vary greatly between different ISPs and
sensors,
The model presented has the following characteristics:
- The image sensor is always configured to output the smallest
resolution possible given the application's requested output stream
sizes.
The smallest resolution is defined as being at least as large as the largest requested output stream size; the camera pipeline must never digitally upsample sensor data when the crop region covers the whole sensor. In general, this means that if only small output stream resolutions are configured, the sensor can provide a higher frame rate. - Since any request may use any or all the currently configured
output streams,
the sensor and ISP must be configured to support scaling a single capture to all the streams at the same time. This means the camera pipeline must be ready to produce the largest requested output size without any delay. Therefore, the overall frame rate of a given configured stream set is governed only by the largest requested stream resolution. - Using more than one output stream in a request does not affect the
frame duration.
- Certain format-streams may need to do additional background processing
before data is consumed/
produced by that stream. These processors can run concurrently to the rest of the camera pipeline, but cannot process more than 1 capture at a time.
The necessary information for the application,
Specifically,
- Let the set of currently configured input/
output streams be called S. - Find the minimum frame durations for each stream in
S,by looking it up in StreamConfigurationMap#getOutputMinFrameDuration (with its respective size/ format). Let this set of frame durations be called F. - For any given request
R,the minimum frame duration allowed for Ris the maximum out of all values inF.Let the streams used in Rbe calledS_.r
If none of the streams in S_ have a stall time (listed in StreamConfigurationMap#getOutputStallDuration
using its respective size/F determines the steady
state frame rate that the application will get if it uses R as a repeating request.Rsimple.
A repeating request Rsimple can be occasionally interleaved by a single capture of a
new request Rstall (which has at least one in-use stream with a non-0 stall time) and if
Rstall has the same minimum frame duration this will not cause a frame rate loss if all
buffers from the previous Rstall have already been delivered.
For more details about stalling,
This control is only effective if android.
For more details about stalling,
The amount of gain applied to sensor data
before processing.
3.
The sensitivity is the standard ISO sensitivity value,
The sensitivity must be within android.
If the camera device cannot apply the exact sensitivity
requested,
This control is only effective if android.
Note that for devices supporting postRawSensitivityBoost,
ISO 12232:2006 REI method is acceptable.
A pixel [R, that supplies the test pattern
when android.
3.
Each color channel is treated as an unsigned 32-bit integer.
For example,
-
OFF (v3.2)
No test pattern mode is used,
and the camera device returns captures from the image sensor. This is the default if the key is not set.
-
SOLID_COLOR (v3.2)
Each pixel in
[R,is replaced by its respective color channel provided in android.G_ even, G_ odd, B] sensor. test Pattern Data. For example:
android.sensor. test Pattern Data = [0, 0xFFFFFFFF, 0xFFFFFFFF, 0] All green pixels are 100% green.
All red/ blue pixels are black. android.sensor. test Pattern Data = [0xFFFFFFFF, 0, 0xFFFFFFFF, 0] All red pixels are 100% red.
Only the odd green pixels are 100% green. All blue pixels are 100% black. -
COLOR_BARS (v3.2)
All pixel data is replaced with an 8-bar color pattern.
The vertical bars (left-to-right) are as follows:
- 100% white
- yellow
- cyan
- green
- magenta
- red
- blue
- black
In general the image would look like the following:
W Y C G M R B K W Y C G M R B K W Y C G M R B K W Y C G M R B K W Y C G M R B K .. . . . . . . . . . . . . . . . . . . . . . . (B = Blue, K = Black) Each bar should take up 1/
8 of the sensor pixel array width. When this is not possible, the bar size should be rounded down to the nearest integer and the pattern can repeat on the right side. Each bar's height must always take up the full sensor pixel array height.
Each pixel in this test pattern must be set to either 0% intensity or 100% intensity.
-
COLOR_BARS_FADE_TO_GRAY (v3.2)
The test pattern is similar to COLOR_
BARS, except that each bar should start at its specified color at the top, and fade to gray at the bottom. Furthermore each bar is further subdivided into a left and right half.
The left half should have a smooth gradient, and the right half should have a quantized gradient. In particular,
the right half's should consist of blocks of the same color for 1/ 16th active sensor pixel array width. The least significant bits in the quantized gradient should be copied from the most significant bits of the smooth gradient.
The height of each bar should always be a multiple of 128.
When this is not the case, the pattern should repeat at the bottom of the image. -
PN9 (v3.2)
All pixel data is replaced by a pseudo-random sequence generated from a PN9 512-bit sequence (typically implemented in hardware with a linear feedback shift register).
The generator should be reset at the beginning of each frame,
and thus each subsequent raw frame with this test pattern should be exactly the same as the last. -
BLACK (v3.6)
[test]
All pixel data is replaced by 0% intensity (black) values.
This test pattern is identical to SOLID_
COLOR with a value of [0,for android.0, 0, 0] sensor. test Pattern Data. It is recommended that devices implement full SOLID_ COLOR support instead, but BLACK can be used to provide minimal support for a test pattern suitable for privacy use cases. -
CUSTOM1 (v3.2)
256
The first custom test pattern.
All custom patterns that are available only on this camera device are at least this numeric value. All of the custom test patterns will be static (that is the raw image must not vary from frame to frame).
When enabled,
3.
When a test pattern is enabled,
For example,
Defaults to OFF.
All test patterns are specified in the Bayer domain.
The HAL may choose to substitute test patterns from the sensor
with test patterns from on-device memory.
For privacy use cases,
- supports SOLID_
COLOR or BLACK test patterns, - is a logical multi-camera,
and - lists testPatternMode as a physical request key,
Each physical camera must support the same SOLID_
-
DEFAULT (v3.6)
This is the default sensor pixel mode.
This is the only sensor pixel mode supported unless a camera device advertises Camera Metadata#REQUEST_ AVAILABLE_ CAPABILITIES_ ULTRA_ HIGH_ RESOLUTION_ SENSOR. -
MAXIMUM_RESOLUTION (v3.6)
This sensor pixel mode is offered by devices with capability Camera
Metadata#REQUEST_ AVAILABLE_ CAPABILITIES_ ULTRA_ HIGH_ RESOLUTION_ SENSOR. In this mode, sensors typically do not bin pixels, as a result can offer larger image sizes.
Switches sensor pixel mode between maximum resolution mode and default mode.
3.
This key controls whether the camera sensor operates in
Cameraandroid. and
android.
must not be mixed in the same CaptureRequest.
The area of the image sensor which corresponds to active pixels after any geometric
distortion correction has been applied.
3.
This is the rectangle representing the size of the active region of the sensor (i.
This rectangle is defined relative to the full pixel array; (0,
The coordinate system for most other keys that list pixel coordinates,(0, being the top-left of this rectangle.
The active array may be smaller than the full pixel array,
For devices that do not support android.
For devices that support android.
In general,
This array contains (xmin,.(xmin, must be
>= (0,.(width, must be <= android..
Range of sensitivities for android.
Min <= 100,
3.
The values are the standard ISO sensitivity values,
- RGGB (v3.2)
- GRBG (v3.2)
- GBRG (v3.2)
- BGGR (v3.2)
-
RGB (v3.2)
Sensor is not Bayer; output has 3 16-bit values for each pixel,
instead of just 1 16-bit value per pixel. -
MONO (v3.4)
Sensor doesn't have any Bayer color filter.
Such sensor captures visible light in monochrome. The exact weighting and wavelengths captured is not specified, but generally only includes the visible frequencies. This value implies a MONOCHROME camera. -
NIR (v3.4)
Sensor has a near infrared filter capturing light with wavelength between roughly 750nm and 1400nm,
and the same filter covers the whole sensor array. This value implies a MONOCHROME camera.
The arrangement of color filters on sensor;
represents the colors in the top-left 2x2 section of
the sensor,
3.
Starting from Android Q,
The range of image exposure times for android.
The minimum exposure time will be less than 100 us.
3.
For FULL capability devices (android.
The maximum possible frame duration (minimum frame rate) for
android.
For FULL capability devices
(android.
3.
Attempting to use frame durations beyond the maximum will result in the frame
duration being clipped to the maximum.
Refer to StreamConfigurationMap#getOutputMinFrameDuration
for the minimum frame duration values.
For FULL capability devices (android.
android.
Available minimum frame durations for JPEG must be no greater
than that of the YUV_
Since JPEG processing is considered offline and can take longer than
a single uncompressed capture,
The physical dimensions of the full pixel
array.
3.
This is the physical size of the sensor pixel
array defined by android.
Needed for FOV calculation for old API
Dimensions of the full pixel array,
3.
The pixel count of the full pixel array of the image sensor,
If a camera device supports raw sensor formats,
Some parts of the full pixel array may not receive light from the scene,
Maximum raw value output by sensor.
> 255 (8-bit output)
3.
This specifies the fully-saturated encoding level for the raw
sample values from the sensor.
The white level is typically determined either by sensor bit depth
(8-14 bits is expected),
The white level values of captured images may vary for different
capture settings (e.
The full bit depth of the sensor must be available in the raw data,
-
UNKNOWN (v3.2)
Timestamps from android.
sensor. timestamp are in nanoseconds and monotonic, but can not be compared to timestamps from other subsystems (e. g. accelerometer, gyro etc. ), or other instances of the same or different camera devices in the same system with accuracy. However, the timestamps are roughly in the same timebase as SystemClock#uptimeMillis. The accuracy is sufficient for tasks like A/ V synchronization for video recording, at least, and the timestamps can be directly used together with timestamps from the audio subsystem for that task. Timestamps between streams and results for a single camera instance are comparable,
and the timestamps for all buffers and the result metadata generated by a single capture are identical. -
REALTIME (v3.2)
Timestamps from android.
sensor. timestamp are in the same timebase as SystemClock#elapsedRealtimeNanos, and they can be compared to other timestamps using that base. When buffers from a REALTIME device are passed directly to a video encoder from the camera,
automatic compensation is done to account for differing timebases of the audio and camera subsystems. If the application is receiving buffers and then later sending them to a video encoder or other application where they are compared with audio subsystem timestamps or similar, this compensation is not present. In those cases, applications need to adjust the timestamps themselves. Since SystemClock#elapsedRealtimeNanos and SystemClock#uptimeMillis only diverge while the device is asleep, an offset between the two sources can be measured once per active session and applied to timestamps for sufficient accuracy for A/ V sync.
The time base source for sensor capture start timestamps.
3.
The timestamps provided for captures are always in nanoseconds and monotonic,
This characteristic defines the source for the timestamps,
For camera devices implement UNKNOWN,
Also,
- FALSE (v3.2)
- TRUE (v3.2)
Whether the RAW images output from this camera device are subject to
lens shading correction.
3.
If TRUE,
This key will be null for all devices do not report this information.
The area of the image sensor which corresponds to active pixels prior to the
application of any geometric distortion correction.
3.
This is the rectangle representing the size of the active region of the sensor (i.
The size of this region determines the maximum field of view and the maximum number of
pixels that an image from this sensor can contain,
E.
- Choose a pixel (x',
y') within the active array region of the raw buffer given in android. sensor. info. pre Correction Active Array Size, otherwise this pixel is considered to be outside of the FOV, and will not be shown in the processed output image. - Apply geometric distortion correction to get the post-distortion pixel coordinate,
(x_ i, y_ i). When applying geometric correction metadata, note that metadata for raw buffers is defined relative to the top, left of the android. sensor. info. pre Correction Active Array Size rectangle. - If the resulting corrected pixel coordinate is within the region given in
android.
sensor. info. active Array Size, then the position of this pixel in the processed output image buffer is (x_,i - activeArray. left, y_ i - activeArray. top) when the top, left coordinate of that buffer is treated as (0, 0).
Thus,
The currently supported fields that correct for geometric distortion are:
If the camera device doesn't support geometric distortion correction,
This rectangle is defined relative to the full pixel array; (0,
The pre-correction active array may be smaller than the full pixel array,
This array contains (xmin,.(xmin, must be
>= (0,.(width, must be <= android..
If omitted by the HAL implementation,
The area of the image sensor which corresponds to active pixels after any geometric
distortion correction has been applied,
3.
Analogous to android.
This array contains (xmin,.(xmin, must be
>= (0,.(width, must be <= android..
Dimensions of the full pixel array,
3.
The pixel count of the full pixel array of the image sensor,
The area of the image sensor which corresponds to active pixels prior to the
application of any geometric distortion correction,
3.
Analogous to android.
This array contains (xmin,.(xmin, must be
>= (0,.(width, must be <= android..
If omitted by the HAL implementation,
Dimensions of the group of pixels which are under the same color filter.
3.
Sensors can have pixels grouped together under the same color filter in order
to improve various aspects of imaging such as noise reduction,
This key will not be present if REMOSAIC_
This key will not be present for sensors which don't have the
Camera
- DAYLIGHT (v3.2) 1
- FLUORESCENT (v3.2) 2
-
TUNGSTEN (v3.2)
3
Incandescent light
- FLASH (v3.2) 4
- FINE_WEATHER (v3.2) 9
- CLOUDY_WEATHER (v3.2) 10
- SHADE (v3.2) 11
-
DAYLIGHT_FLUORESCENT (v3.2)
12
D 5700 - 7100K
-
DAY_WHITE_FLUORESCENT (v3.2)
13
N 4600 - 5400K
-
COOL_WHITE_FLUORESCENT (v3.2)
14
W 3900 - 4500K
-
WHITE_FLUORESCENT (v3.2)
15
WW 3200 - 3700K
- STANDARD_A (v3.2) 17
- STANDARD_B (v3.2) 18
- STANDARD_C (v3.2) 19
- D55 (v3.2) 20
- D65 (v3.2) 21
- D75 (v3.2) 22
- D50 (v3.2) 23
- ISO_STUDIO_TUNGSTEN (v3.2) 24
The standard reference illuminant used as the scene light source when
calculating the android.
3.
The values in this key correspond to the values defined for the
EXIF LightSource tag.
If this key is present,
Some devices may choose to provide a second set of calibration
information for improved quality,
Starting from Android Q,
The first reference illuminant (android.
When producing raw images with a color profile that has only been
calibrated against a single light source,
If only android.
If both android.
The standard reference illuminant used as the scene light source when
calculating the android.
Any value listed in android.
3.
See android.
If this key is present,
Starting from Android Q,
A per-device calibration transform matrix that maps from the
reference sensor colorspace to the actual device sensor colorspace.
3.
This matrix is used to correct for per-device variations in the
sensor colorspace,
The matrix is expressed as a 3x3 matrix in row-major-order,
Starting from Android Q,
A per-device calibration transform matrix that maps from the
reference sensor colorspace to the actual device sensor colorspace
(this is the colorspace of the raw buffer data).
3.
This matrix is used to correct for per-device variations in the
sensor colorspace,
The matrix is expressed as a 3x3 matrix in row-major-order,
This matrix will only be present if the second reference
illuminant is present.
Starting from Android Q,
A matrix that transforms color values from CIE XYZ color space to
reference sensor color space.
3.
This matrix is used to convert from the standard CIE XYZ color
space to the reference sensor colorspace,
The matrix is expressed as a 3x3 matrix in row-major-order,
The white points chosen in both the reference sensor color space
and the CIE XYZ colorspace when calculating this transform will
match the standard white point for the first reference illuminant
(i.
Starting from Android Q,
A matrix that transforms color values from CIE XYZ color space to
reference sensor color space.
3.
This matrix is used to convert from the standard CIE XYZ color
space to the reference sensor colorspace,
The matrix is expressed as a 3x3 matrix in row-major-order,
The white points chosen in both the reference sensor color space
and the CIE XYZ colorspace when calculating this transform will
match the standard white point for the second reference illuminant
(i.
This matrix will only be present if the second reference
illuminant is present.
Starting from Android Q,
A matrix that transforms white balanced camera colors from the reference
sensor colorspace to the CIE XYZ colorspace with a D50 whitepoint.
3.
This matrix is used to convert to the standard CIE XYZ colorspace,
This matrix is expressed as a 3x3 matrix in row-major-order,
Under the first reference illuminant (android.
Starting from Android Q,
A matrix that transforms white balanced camera colors from the reference
sensor colorspace to the CIE XYZ colorspace with a D50 whitepoint.
3.
This matrix is used to convert to the standard CIE XYZ colorspace,
This matrix is expressed as a 3x3 matrix in row-major-order,
Under the second reference illuminant (android.
This matrix will only be present if the second reference
illuminant is present.
Starting from Android Q,
Gain factor from electrons to raw units when ISO=100
3.
A fixed black level offset for each of the color filter arrangement
(CFA) mosaic channels.
>= 0 for each.
3.
This key specifies the zero light value for each of the CFA mosaic
channels in the camera sensor.
The values are given in the same order as channels listed for the CFA
layout key (see android.
The black level values of captured images may vary for different
capture settings (e.
For a MONOCHROME camera device,
The values are given in row-column scan order,
Maximum sensitivity that is implemented
purely through analog gain.
3.
For android.
Clockwise angle through which the output image needs to be rotated to be
upright on the device screen in its native orientation.
0,
3.
Also defines the direction of rolling shutter readout,
Starting with Android API level 32,
The number of input samples for each dimension of
android.
Hue >= 1,
3.
The number of input samples for the hue,
List of sensor test pattern modes for android.
Any value listed in android.
3.
Defaults to OFF,
All custom modes must be >= CUSTOM1.
List of disjoint rectangles indicating the sensor
optically shielded black pixel regions.
3.
In most camera sensors,
This key provides a list of disjoint rectangles specifying the
regions of optically shielded (with metal shield) black pixel
regions if the camera device is capable of reading out these black
pixels in the output raw images.
When this key is reported,
This array contains (xmin,
The HAL must report minimal number of disjoint regions for the
optically shielded back pixel regions.
Size in bytes for all the listed opaque RAW buffer sizes
Must be large enough to fit the opaque RAW of corresponding size produced by the camera
3.
This configurations are listed as (width, tuples.
This key is added in legacy HAL3.
For legacy HAL3.
Size in bytes for all the listed opaque RAW buffer sizes when
android.
Must be large enough to fit the opaque RAW of corresponding size produced by the camera
3.
Refer to android.
Refer to android.
-
NOT_SUPPORTED (v3.8)
This camera device doesn't support readout timestamp and onReadoutStarted callback.
-
HARDWARE (v3.8)
This camera device supports the onReadoutStarted callback as well as outputting readout timestamp for streams with TIMESTAMP_
BASE_ READOUT_ SENSOR timestamp base. The readout timestamp is generated by the camera hardware and it has the same accuracy and timing characteristics of the start-of-exposure time.
Whether or not the camera device supports readout timestamp and
onReadoutStarted callback.
3.
If this tag is HARDWARE,
The readout timestamp is beneficial for video recording,
If this tag is HARDWARE,
This property is populated by the camera framework and must not be set at the HAL layer.
Duration each pixel is exposed to
light.
3.
If the sensor can't expose this exact duration,
This control is only effective if android.
Duration from start of frame exposure to
start of next frame exposure.
See android.max(duration,.
3.
The maximum frame rate that can be supported by a camera subsystem is a function of many factors:
- Requested resolutions of output image streams
- Availability of binning /
skipping modes on the imager - The bandwidth of the imager interface
- The bandwidth of the various ISP processing blocks
Since these factors can vary greatly between different ISPs and
sensors,
The model presented has the following characteristics:
- The image sensor is always configured to output the smallest
resolution possible given the application's requested output stream
sizes.
The smallest resolution is defined as being at least as large as the largest requested output stream size; the camera pipeline must never digitally upsample sensor data when the crop region covers the whole sensor. In general, this means that if only small output stream resolutions are configured, the sensor can provide a higher frame rate. - Since any request may use any or all the currently configured
output streams,
the sensor and ISP must be configured to support scaling a single capture to all the streams at the same time. This means the camera pipeline must be ready to produce the largest requested output size without any delay. Therefore, the overall frame rate of a given configured stream set is governed only by the largest requested stream resolution. - Using more than one output stream in a request does not affect the
frame duration.
- Certain format-streams may need to do additional background processing
before data is consumed/
produced by that stream. These processors can run concurrently to the rest of the camera pipeline, but cannot process more than 1 capture at a time.
The necessary information for the application,
Specifically,
- Let the set of currently configured input/
output streams be called S. - Find the minimum frame durations for each stream in
S,by looking it up in StreamConfigurationMap#getOutputMinFrameDuration (with its respective size/ format). Let this set of frame durations be called F. - For any given request
R,the minimum frame duration allowed for Ris the maximum out of all values inF.Let the streams used in Rbe calledS_.r
If none of the streams in S_ have a stall time (listed in StreamConfigurationMap#getOutputStallDuration
using its respective size/F determines the steady
state frame rate that the application will get if it uses R as a repeating request.Rsimple.
A repeating request Rsimple can be occasionally interleaved by a single capture of a
new request Rstall (which has at least one in-use stream with a non-0 stall time) and if
Rstall has the same minimum frame duration this will not cause a frame rate loss if all
buffers from the previous Rstall have already been delivered.
For more details about stalling,
This control is only effective if android.
For more details about stalling,
The amount of gain applied to sensor data
before processing.
3.
The sensitivity is the standard ISO sensitivity value,
The sensitivity must be within android.
If the camera device cannot apply the exact sensitivity
requested,
This control is only effective if android.
Note that for devices supporting postRawSensitivityBoost,
ISO 12232:2006 REI method is acceptable.
Time at start of exposure of first
row of the image sensor active array,
> 0
3.
The timestamps are also included in all image
buffers produced for the same capture,
When android.== UNKNOWN,
When android.== REALTIME,
For reprocessing,
All timestamps must be in reference to the kernel's
CLOCK_
If android.== REALTIME,
For reprocessing,
The temperature of the sensor,
The thermal diode being queried should be inside the sensor PCB,
Optional.
3.
The estimated camera neutral color in the native sensor colorspace at
the time of capture.
3.
This value gives the neutral color point encoded as an RGB value in the
native sensor color space.
The order of the values is R,
Starting from Android Q,
Noise model coefficients for each CFA mosaic channel.
3.
This key contains two noise model coefficients for each CFA channel
corresponding to the sensor amplification (S) and sensor readout
noise (O).
These coefficients are used in a two parameter noise model to describe
the amount of noise present in the image for each CFA channel.
N(x) = sqrt(Sx + O)
Where x represents the recorded signal of a CFA channel normalized to
the range [0,
A more detailed description of the noise model can be found in the
Adobe DNG specification for the NoiseProfile tag.
For a MONOCHROME camera,
For a CFA layout of RGGB,
A mapping containing a hue shift,
3.
hue_
Each entry of this map contains three floats corresponding to the
hue shift,
A list of x,
Each sample has an input range of [0, and an output range of
[0,.(0,,(1,.
3.
This key contains a default tone curve that can be applied while
processing the image as a starting point for user adjustments.
The worst-case divergence between Bayer green channels.
>= 0
3.
This value is an estimate of the worst case split between the
Bayer green channels in the red and blue rows in the sensor color
filter array.
The green split is calculated as follows:
- A 5x5 pixel (or larger) window W within the active sensor array is
chosen.
The term 'pixel' here is taken to mean a group of 4 Bayer mosaic channels (R, Gr, Gb, B). The location and size of the window chosen is implementation defined, and should be chosen to provide a green split estimate that is both representative of the entire image for this camera sensor, and can be calculated quickly. - The arithmetic mean of the green channels from the red
rows (mean_
Gr) within W is computed. - The arithmetic mean of the green channels from the blue
rows (mean_
Gb) within W is computed. - The maximum ratio R of the two means is computed as follows:
R = max((mean_Gr + 1)/ (mean_ Gb + 1), (mean_ Gb + 1)/ (mean_ Gr + 1))
The ratio R is the green split divergence reported for this property,
The green split value can be roughly interpreted as follows:
- R < 1.
03 is a negligible split (<3% divergence). - 1.
20 <= R >= 1. 03 will require some software correction to avoid demosaic errors (3-20% divergence). - R > 1.
20 will require strong software correction to produce a usable image (>20% divergence).
Starting from Android Q,
The green split given may be a static value based on prior
characterization of the camera sensor using the green split
calculation method given here over a large,
A pixel [R, that supplies the test pattern
when android.
3.
Each color channel is treated as an unsigned 32-bit integer.
For example,
-
OFF (v3.2)
No test pattern mode is used,
and the camera device returns captures from the image sensor. This is the default if the key is not set.
-
SOLID_COLOR (v3.2)
Each pixel in
[R,is replaced by its respective color channel provided in android.G_ even, G_ odd, B] sensor. test Pattern Data. For example:
android.sensor. test Pattern Data = [0, 0xFFFFFFFF, 0xFFFFFFFF, 0] All green pixels are 100% green.
All red/ blue pixels are black. android.sensor. test Pattern Data = [0xFFFFFFFF, 0, 0xFFFFFFFF, 0] All red pixels are 100% red.
Only the odd green pixels are 100% green. All blue pixels are 100% black. -
COLOR_BARS (v3.2)
All pixel data is replaced with an 8-bar color pattern.
The vertical bars (left-to-right) are as follows:
- 100% white
- yellow
- cyan
- green
- magenta
- red
- blue
- black
In general the image would look like the following:
W Y C G M R B K W Y C G M R B K W Y C G M R B K W Y C G M R B K W Y C G M R B K .. . . . . . . . . . . . . . . . . . . . . . . (B = Blue, K = Black) Each bar should take up 1/
8 of the sensor pixel array width. When this is not possible, the bar size should be rounded down to the nearest integer and the pattern can repeat on the right side. Each bar's height must always take up the full sensor pixel array height.
Each pixel in this test pattern must be set to either 0% intensity or 100% intensity.
-
COLOR_BARS_FADE_TO_GRAY (v3.2)
The test pattern is similar to COLOR_
BARS, except that each bar should start at its specified color at the top, and fade to gray at the bottom. Furthermore each bar is further subdivided into a left and right half.
The left half should have a smooth gradient, and the right half should have a quantized gradient. In particular,
the right half's should consist of blocks of the same color for 1/ 16th active sensor pixel array width. The least significant bits in the quantized gradient should be copied from the most significant bits of the smooth gradient.
The height of each bar should always be a multiple of 128.
When this is not the case, the pattern should repeat at the bottom of the image. -
PN9 (v3.2)
All pixel data is replaced by a pseudo-random sequence generated from a PN9 512-bit sequence (typically implemented in hardware with a linear feedback shift register).
The generator should be reset at the beginning of each frame,
and thus each subsequent raw frame with this test pattern should be exactly the same as the last. -
BLACK (v3.6)
[test]
All pixel data is replaced by 0% intensity (black) values.
This test pattern is identical to SOLID_
COLOR with a value of [0,for android.0, 0, 0] sensor. test Pattern Data. It is recommended that devices implement full SOLID_ COLOR support instead, but BLACK can be used to provide minimal support for a test pattern suitable for privacy use cases. -
CUSTOM1 (v3.2)
256
The first custom test pattern.
All custom patterns that are available only on this camera device are at least this numeric value. All of the custom test patterns will be static (that is the raw image must not vary from frame to frame).
When enabled,
3.
When a test pattern is enabled,
For example,
Defaults to OFF.
All test patterns are specified in the Bayer domain.
The HAL may choose to substitute test patterns from the sensor
with test patterns from on-device memory.
For privacy use cases,
- supports SOLID_
COLOR or BLACK test patterns, - is a logical multi-camera,
and - lists testPatternMode as a physical request key,
Each physical camera must support the same SOLID_
Duration between the start of exposure for the first row of the image sensor,
>= 0 and <
StreamConfigurationMap#getOutputMinFrameDuration.
3.
This is the exposure time skew between the first and (last+1) row exposure start times.
For typical camera sensors that use rolling shutters,
If the image sensor is operating in a binned or cropped mode due to the current output
target resolutions,
Note: Prior to Android 11,
The HAL must report 0 if the sensor is using global shutter,
A per-frame dynamic black level offset for each of the color filter
arrangement (CFA) mosaic channels.
>= 0 for each.
3.
Camera sensor black levels may vary dramatically for different
capture settings (e.
This key reports the camera device estimated per-frame zero light
value for each of the CFA mosaic channels in the camera sensor.
The values are given in the same order as channels listed for the CFA
layout key (see android.
For a MONOCHROME camera,
This key will be available if android.
The values are given in row-column scan order,
Maximum raw value output by sensor for this frame.
>= 0
3.
Since the android.
This key will be available if android.
The full bit depth of the sensor must be available in the raw data,
-
DEFAULT (v3.6)
This is the default sensor pixel mode.
This is the only sensor pixel mode supported unless a camera device advertises Camera Metadata#REQUEST_ AVAILABLE_ CAPABILITIES_ ULTRA_ HIGH_ RESOLUTION_ SENSOR. -
MAXIMUM_RESOLUTION (v3.6)
This sensor pixel mode is offered by devices with capability Camera
Metadata#REQUEST_ AVAILABLE_ CAPABILITIES_ ULTRA_ HIGH_ RESOLUTION_ SENSOR. In this mode, sensors typically do not bin pixels, as a result can offer larger image sizes.
Switches sensor pixel mode between maximum resolution mode and default mode.
3.
This key controls whether the camera sensor operates in
Cameraandroid. and
android.
must not be mixed in the same CaptureRequest.
-
TRUE (v3.6)
The
RAWtargets in this capture have android.sensor. info. binning Factor as the bayer pattern. -
FALSE (v3.6)
The
RAWtargets have a regular bayer pattern in this capture.
Whether RAW images requested have their bayer pattern as described by
android.
3.
This key will only be present in devices advertising the
CameraREMOSAIC_ capability.
-
OFF (v3.2)
No lens shading correction is applied.
-
FAST (v3.2)
Apply lens shading corrections,
without slowing frame rate relative to sensor raw output -
HIGH_QUALITY (v3.2)
Apply high-quality lens shading correction,
at the cost of possibly reduced frame rate.
Quality of lens shading correction applied
to the image data.
3.
When set to OFF mode,android..[ 4,,
[ 1.When set to other modes,
The shading map data may depend on the auto-exposure (AE) and AWB statistics,!= OFF and android.!=
OFF),
Control the amount of shading correction applied to the images
3.
-
OFF (v3.2)
No lens shading correction is applied.
-
FAST (v3.2)
Apply lens shading corrections,
without slowing frame rate relative to sensor raw output -
HIGH_QUALITY (v3.2)
Apply high-quality lens shading correction,
at the cost of possibly reduced frame rate.
Quality of lens shading correction applied
to the image data.
3.
When set to OFF mode,android..[ 4,,
[ 1.When set to other modes,
The shading map data may depend on the auto-exposure (AE) and AWB statistics,!= OFF and android.!=
OFF),
List of lens shading modes for android.
Any value listed in android.
3.
This list contains lens shading modes that can be set for the camera device.
HAL must support both FAST and HIGH_
-
OFF (v3.2)
Do not include face detection statistics in capture results.
-
SIMPLE (v3.2)
[optional]
Return face rectangle and confidence values only.
-
FULL (v3.2)
[optional]
Return all face metadata.
In this mode,
face rectangles, scores, landmarks, and face IDs are all valid.
Operating mode for the face detector
unit.
3.
Whether face detection is enabled,
SIMPLE mode must fill in android.
- OFF (v3.2)
- ON (v3.2)
Operating mode for histogram generation
3.
- OFF (v3.2)
- ON (v3.2)
Operating mode for sharpness map generation
3.
-
OFF (v3.2)
Hot pixel map production is disabled.
-
ON (v3.2)
Hot pixel map production is enabled.
Operating mode for hot pixel map generation.
3.
If set to true,false,
-
OFF (v3.2)
Do not include a lens shading map in the capture result.
-
ON (v3.2)
Include a lens shading map in the capture result.
Whether the camera device will output the lens
shading map in output result metadata.
3.
When set to ON,
ON is always supported on devices with the RAW capability.
-
OFF (v3.3)
Do not include OIS data in the capture result.
-
ON (v3.3)
Include OIS data in the capture result.
A control for selecting whether optical stabilization (OIS) position
information is included in output result metadata.
3.
Since optical image stabilization generally involves motion much faster than the duration
of individual image exposure,
List of face detection modes for android.
Any value listed in android.
3.
OFF is always supported.
Number of histogram buckets supported
>= 64
3.
The maximum number of simultaneously detectable
faces.
0 for cameras without available face detection; otherwise:
>=4 for LIMITED or FULL hwlevel devices or
>0 for LEGACY devices.
3.
Maximum value possible for a histogram bucket
3.
Maximum value possible for a sharpness map
region.
3.
Dimensions of the sharpness map
Must be at least 32 x 32
3.
List of hot pixel map output modes for android.
Any value listed in android.
3.
If no hotpixel map output is available for this camera device,false.
ON is always supported on devices with the RAW capability.
List of lens shading map output modes for android.
Any value listed in android.
3.
If no lens shading map output is available for this camera device,
ON is always supported on devices with the RAW capability.
List of OIS data output modes for android.
Any value listed in android.
3.
If no OIS data output is available for this camera device,
-
OFF (v3.2)
Do not include face detection statistics in capture results.
-
SIMPLE (v3.2)
[optional]
Return face rectangle and confidence values only.
-
FULL (v3.2)
[optional]
Return all face metadata.
In this mode,
face rectangles, scores, landmarks, and face IDs are all valid.
Operating mode for the face detector
unit.
3.
Whether face detection is enabled,
SIMPLE mode must fill in android.
List of unique IDs for detected faces.
3.
Each detected face is given a unique ID that is valid for as long as the face is visible
to the camera device.
Only available if android.
List of landmarks for detected
faces.
3.
For devices not supporting android.(0, being
the top-left pixel of the active array.
For devices supporting android.(0, being the top-left pixel of the pre-correction active array.(0, being the top-left pixel of the active array.
Only available if android.
Starting from API level 30,
HAL must always report face landmarks in the coordinate system of pre-correction
active array.
List of the bounding rectangles for detected
faces.
3.
For devices not supporting android.(0, being
the top-left pixel of the active array.
For devices supporting android.(0, being the top-left pixel of the pre-correction active array.(0, being the top-left pixel of the active array.
Only available if android.
Starting from API level 30,
HAL must always report face rectangles in the coordinate system of pre-correction
active array.
List of the face confidence scores for detected faces
1-100
3.
Only available if android.
The value should be meaningful (for example,
List of the faces detected through camera face detection
in this capture.
3.
Only available if android.!= OFF.
A 3-channel histogram based on the raw sensor data
3.
The k'th bucket (0-based) covers the input range
(with w = android.
- OFF (v3.2)
- ON (v3.2)
Operating mode for histogram generation
3.
A 3-channel sharpness map,
3.
If only a monochrome sharpness map is supported,
- OFF (v3.2)
- ON (v3.2)
Operating mode for sharpness map generation
3.
The shading map is a low-resolution floating-point map
that lists the coefficients used to correct for vignetting,
Each gain factor is >= 1
3.
The map provided here is the same map that is used by the camera device to
correct both color shading and vignetting for output non-RAW images.
When there is no lens shading correction applied to RAW
output images (android.==
false),== true),
For a complete shading correction map,
When android.
The shading map is for the entire active pixel array,
The channel order is [R,
The shading map will generally have on the order of 30-40 rows and columns,
As an example,
width,The low-resolution scaling map images for each channel are (displayed using nearest-neighbor interpolation):
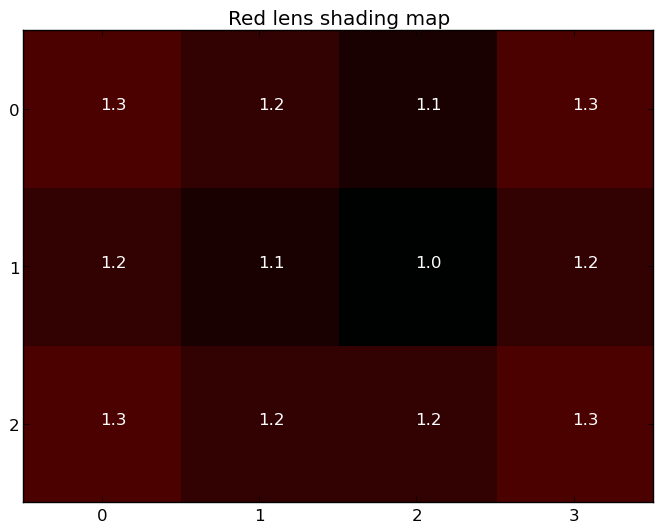
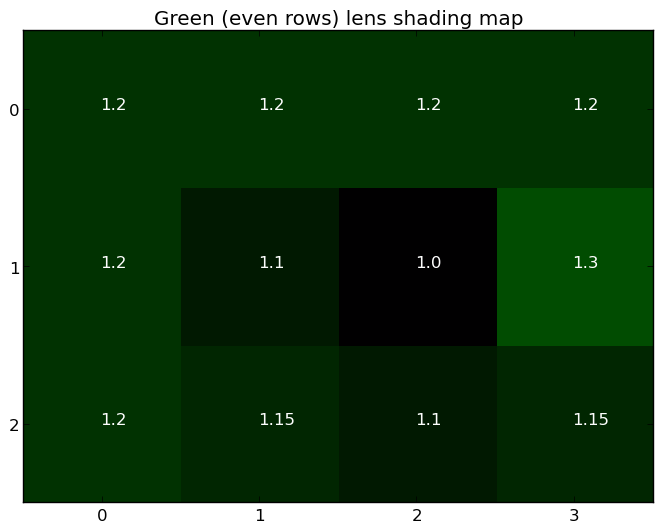
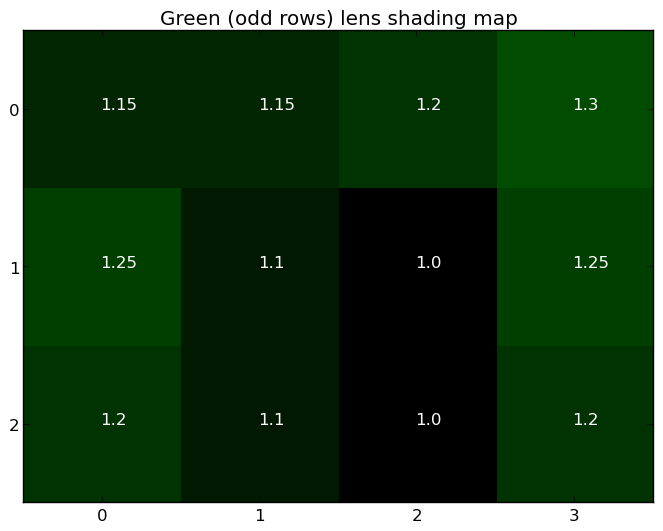
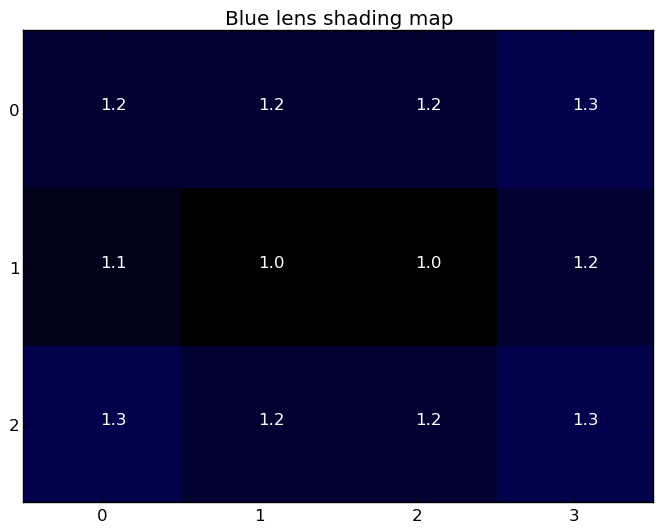
As a visualization only,
For a MONOCHROME camera,
android.The shading map is a low-resolution floating-point map
that lists the coefficients used to correct for vignetting and color shading,
Each gain factor is >= 1
3.
The map provided here is the same map that is used by the camera device to
correct both color shading and vignetting for output non-RAW images.
When there is no lens shading correction applied to RAW
output images (android.==
false),== true),
For a complete shading correction map,
When android.
The shading map is for the entire active pixel array,
For a Bayer camera,
The shading map will generally have on the order of 30-40 rows and columns,
As an example,
android.The low-resolution scaling map images for each channel are (displayed using nearest-neighbor interpolation):
As a visualization only,
For a MONOCHROME camera,
android.Note that the RAW image data might be subject to lens shading
correction not reported on this map.
The lens shading map calculation may depend on exposure and white balance statistics.!= OFF and android.!= OFF),== OFF or android.== OFF),
The best-fit color channel gains calculated
by the camera device's statistics units for the current output frame.
Deprecated. Do not use.
3.
This may be different than the gains used for this frame,
The 4 channel gains are defined in Bayer domain,
This value should always be calculated by the auto-white balance (AWB) block,
The best-fit color transform matrix estimate
calculated by the camera device's statistics units for the current
output frame.
Deprecated. Do not use.
3.
The camera device will provide the estimate from its
statistics unit on the white balance transforms to use
for the next frame.
These estimates must be provided for all frames,
This value should always be calculated by the auto-white balance (AWB) block,
-
NONE (v3.2)
The camera device does not detect any flickering illumination in the current scene.
-
50HZ (v3.2)
The camera device detects illumination flickering at 50Hz in the current scene.
-
60HZ (v3.2)
The camera device detects illumination flickering at 60Hz in the current scene.
The camera device estimated scene illumination lighting
frequency.
3.
Many light sources,
When manual exposure control is enabled
(android. or android.),
Reports NONE if there doesn't appear to be flickering illumination.
-
OFF (v3.2)
Hot pixel map production is disabled.
-
ON (v3.2)
Hot pixel map production is enabled.
Operating mode for hot pixel map generation.
3.
If set to true,false,
List of (x, coordinates of hot/
n <= number of pixels on the sensor.(x, coordinates must be bounded by
android.
3.
A coordinate (x, must lie between (0,,(width - 1, (inclusive),
A hotpixel map contains the coordinates of pixels on the camera
sensor that do report valid values (usually due to defects in
the camera sensor).
To avoid performance issues,
-
OFF (v3.2)
Do not include a lens shading map in the capture result.
-
ON (v3.2)
Include a lens shading map in the capture result.
Whether the camera device will output the lens
shading map in output result metadata.
3.
When set to ON,
ON is always supported on devices with the RAW capability.
-
OFF (v3.3)
Do not include OIS data in the capture result.
-
ON (v3.3)
Include OIS data in the capture result.
A control for selecting whether optical stabilization (OIS) position
information is included in output result metadata.
3.
Since optical image stabilization generally involves motion much faster than the duration
of individual image exposure,
An array of timestamps of OIS samples,
3.
The array contains the timestamps of OIS samples.
An array of shifts of OIS samples,
3.
The array contains the amount of shifts in x direction,
The number of shifts must match the number of timestamps in
android.
The OIS samples are not affected by whether lens distortion correction is enabled (on
supporting devices).
An array of shifts of OIS samples,
3.
The array contains the amount of shifts in y direction,
The number of shifts must match the number of timestamps in
android.
The OIS samples are not affected by whether lens distortion correction is enabled (on
supporting devices).
An array of optical stabilization (OIS) position samples.
3.
Each OIS sample contains the timestamp and the amount of shifts in x and y direction,
A positive value for a shift in x direction is a shift from left to right in the
pre-correction active array coordinate system.
A positive value for a shift in y direction is a shift from top to bottom in
pre-correction active array coordinate system.
The OIS samples are not affected by whether lens distortion correction is enabled (on
supporting devices).
Tonemapping /
3.
See android.
Tonemapping /
3.
See android.
Tonemapping /
0-1 on both input and output coordinates,
3.
Each channel's curve is defined by an array of control points:
android.These are sorted in order of increasing Pin; it is
required that input values 0.
Each curve can have an independent number of points,
For devices with MONOCHROME capability,
A few examples,
Linear mapping:
android.
Invert mapping:
android.
Gamma 1/
android.
Standard sRGB gamma mapping,
android.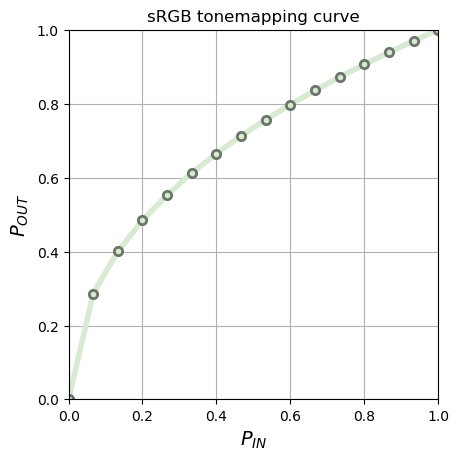
For good quality of mapping,
A typical use case of this would be a gamma-1/
Tonemapping /
3.
The tonemapCurve consist of three curves for each of red,
curveRed =
[ P0(in,These are sorted in order of increasing Pin; it is always
guaranteed that input values 0.
Each curve can have an independent number of points,
For devices with MONOCHROME capability,
A few examples,
Linear mapping:
curveRed = [ (0,
Invert mapping:
curveRed = [ (0,
Gamma 1/
curveRed = [
(0.
Standard sRGB gamma mapping,
curveRed = [
(0.
This entry is created by the framework from the curveRed,
-
CONTRAST_CURVE (v3.2)
Use the tone mapping curve specified in the android.
tonemap. curve* entries. All color enhancement and tonemapping must be disabled,
except for applying the tonemapping curve specified by android. tonemap. curve. Must not slow down frame rate relative to raw sensor output.
-
FAST (v3.2)
Advanced gamma mapping and color enhancement may be applied,
without reducing frame rate compared to raw sensor output. -
HIGH_QUALITY (v3.2)
High-quality gamma mapping and color enhancement will be applied,
at the cost of possibly reduced frame rate compared to raw sensor output. -
GAMMA_VALUE (v3.2)
Use the gamma value specified in android.
tonemap. gamma to perform tonemapping. All color enhancement and tonemapping must be disabled,
except for applying the tonemapping curve specified by android. tonemap. gamma. Must not slow down frame rate relative to raw sensor output.
-
PRESET_CURVE (v3.2)
Use the preset tonemapping curve specified in android.
tonemap. preset Curve to perform tonemapping. All color enhancement and tonemapping must be disabled,
except for applying the tonemapping curve specified by android. tonemap. preset Curve. Must not slow down frame rate relative to raw sensor output.
High-level global contrast/
3.
When switching to an application-defined contrast curve by setting
android.(in, points that specify the
mapping from input high-bit-depth pixel value to the output
low-bit-depth value.
More-complex color mapping operations such as 3D color look-up
tables,
When using either FAST or HIGH_
If a request is sent with CONTRAST_
Tonemapping curve to use when android.
3.
The tonemap curve will be defined the following formula:
- OUT = pow(IN,
1. 0 / gamma)
where IN and OUT is the input pixel value scaled to range [0.
The same curve will be applied to all color channels.
The valid range of gamma value varies on different devices,
-
SRGB (v3.2)
Tonemapping curve is defined by sRGB
-
REC709 (v3.2)
Tonemapping curve is defined by ITU-R BT.
709
Tonemapping curve to use when android.
3.
The tonemap curve will be defined by specified standard.
sRGB (approximated by 16 control points):
Rec.
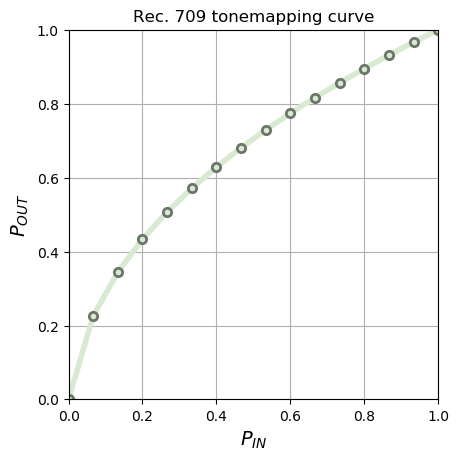
Note that above figures show a 16 control points approximation of preset
curves.
Maximum number of supported points in the
tonemap curve that can be used for android.
3.
If the actual number of points provided by the application (in android.
The output curves in the result metadata may have a different number
of points than the input curves,
This value must be at least 64.
List of tonemapping modes for android.
Any value listed in android.
3.
Camera devices that support the MANUAL_
- CONTRAST_
CURVE, FAST and HIGH_ QUALITY - GAMMA_
VALUE, PRESET_ CURVE, FAST and HIGH_ QUALITY
This includes all FULL level devices.
HAL must support both FAST and HIGH_
Tonemapping /
3.
See android.
Tonemapping /
3.
See android.
Tonemapping /
0-1 on both input and output coordinates,
3.
Each channel's curve is defined by an array of control points:
android.These are sorted in order of increasing Pin; it is
required that input values 0.
Each curve can have an independent number of points,
For devices with MONOCHROME capability,
A few examples,
Linear mapping:
android.
Invert mapping:
android.
Gamma 1/
android.
Standard sRGB gamma mapping,
android.
For good quality of mapping,
A typical use case of this would be a gamma-1/
Tonemapping /
3.
The tonemapCurve consist of three curves for each of red,
curveRed =
[ P0(in,These are sorted in order of increasing Pin; it is always
guaranteed that input values 0.
Each curve can have an independent number of points,
For devices with MONOCHROME capability,
A few examples,
Linear mapping:
curveRed = [ (0,
Invert mapping:
curveRed = [ (0,
Gamma 1/
curveRed = [
(0.
Standard sRGB gamma mapping,
curveRed = [
(0.
This entry is created by the framework from the curveRed,
-
CONTRAST_CURVE (v3.2)
Use the tone mapping curve specified in the android.
tonemap. curve* entries. All color enhancement and tonemapping must be disabled,
except for applying the tonemapping curve specified by android. tonemap. curve. Must not slow down frame rate relative to raw sensor output.
-
FAST (v3.2)
Advanced gamma mapping and color enhancement may be applied,
without reducing frame rate compared to raw sensor output. -
HIGH_QUALITY (v3.2)
High-quality gamma mapping and color enhancement will be applied,
at the cost of possibly reduced frame rate compared to raw sensor output. -
GAMMA_VALUE (v3.2)
Use the gamma value specified in android.
tonemap. gamma to perform tonemapping. All color enhancement and tonemapping must be disabled,
except for applying the tonemapping curve specified by android. tonemap. gamma. Must not slow down frame rate relative to raw sensor output.
-
PRESET_CURVE (v3.2)
Use the preset tonemapping curve specified in android.
tonemap. preset Curve to perform tonemapping. All color enhancement and tonemapping must be disabled,
except for applying the tonemapping curve specified by android. tonemap. preset Curve. Must not slow down frame rate relative to raw sensor output.
High-level global contrast/
3.
When switching to an application-defined contrast curve by setting
android.(in, points that specify the
mapping from input high-bit-depth pixel value to the output
low-bit-depth value.
More-complex color mapping operations such as 3D color look-up
tables,
When using either FAST or HIGH_
If a request is sent with CONTRAST_
Tonemapping curve to use when android.
3.
The tonemap curve will be defined the following formula:
- OUT = pow(IN,
1. 0 / gamma)
where IN and OUT is the input pixel value scaled to range [0.
The same curve will be applied to all color channels.
The valid range of gamma value varies on different devices,
-
SRGB (v3.2)
Tonemapping curve is defined by sRGB
-
REC709 (v3.2)
Tonemapping curve is defined by ITU-R BT.
709
Tonemapping curve to use when android.
3.
The tonemap curve will be defined by specified standard.
sRGB (approximated by 16 control points):
Rec.
Note that above figures show a 16 control points approximation of preset
curves.
- OFF (v3.2)
- ON (v3.2)
This LED is nominally used to indicate to the user
that the camera is powered on and may be streaming images back to the
Application Processor.
In particular,
The LED may be off if a trusted application is using the data that
doesn't violate the above rules.
3.
- OFF (v3.2)
- ON (v3.2)
This LED is nominally used to indicate to the user
that the camera is powered on and may be streaming images back to the
Application Processor.
In particular,
The LED may be off if a trusted application is using the data that
doesn't violate the above rules.
3.
-
TRANSMIT (v3.2)
android.
led. transmit control is used.
A list of camera LEDs that are available on this system.
3.
-
LIMITED (v3.2)
This camera device does not have enough capabilities to qualify as a
FULLdevice or better.Only the stream configurations listed in the
LEGACYandLIMITEDtables in the createCaptureSession documentation are guaranteed to be supported.All
LIMITEDdevices support theBACKWARDS_capability,COMPATIBLE indicating basic support for color image capture. The only exception is that the device may alternatively support only the DEPTH_capability,OUTPUT if it can only output depth measurements and not color images. LIMITEDdevices and above require the use of android.control. ae Precapture Trigger to lock exposure metering (and calculate flash power, for cameras with flash) before capturing a high-quality still image. A
LIMITEDdevice that only lists theBACKWARDS_capability is only required to support full-automatic operation and post-processing (COMPATIBLE OFFis not supported for android.control. ae Mode, android. control. af Mode, or android. control. awb Mode) Additional capabilities may optionally be supported by a
LIMITED-level device,and can be checked for in android. request. available Capabilities. -
FULL (v3.2)
This camera device is capable of supporting advanced imaging applications.
The stream configurations listed in the
FULL,LEGACYandLIMITEDtables in the createCaptureSession documentation are guaranteed to be supported.A
FULLdevice will support below capabilities:BURST_capability (android.CAPTURE request. available Capabilities contains BURST_)CAPTURE - Per frame control (android.
sync. max Latency ==PER_FRAME_ CONTROL) - Manual sensor control (android.
request. available Capabilities contains MANUAL_)SENSOR - Manual post-processing control (android.
request. available Capabilities contains MANUAL_)POST_ PROCESSING - The required exposure time range defined in android.
sensor. info. exposure Time Range - The required maxFrameDuration defined in android.
sensor. info. max Frame Duration
Note: Pre-API level 23,
FULL devices also supported arbitrary cropping region (android. scaler. cropping Type == FREEFORM); this requirement was relaxed in API level 23,and FULLdevices may only supportCENTEREDcropping. -
LEGACY (v3.2)
This camera device is running in backward compatibility mode.
Only the stream configurations listed in the
LEGACYtable in the createCaptureSession documentation are supported.A
LEGACYdevice does not support per-frame control,manual sensor control, manual post-processing, arbitrary cropping regions, and has relaxed performance constraints. No additional capabilities beyond BACKWARD_will ever be listed by aCOMPATIBLE LEGACYdevice in android.request. available Capabilities. In addition,
the android. control. ae Precapture Trigger is not functional on LEGACYdevices.Instead, every request that includes a JPEG-format output target is treated as triggering a still capture, internally executing a precapture trigger. This may fire the flash for flash power metering during precapture, and then fire the flash for the final capture, if a flash is available on the device and the AE mode is set to enable the flash. Devices that initially shipped with Android version Q or newer will not include any LEGACY-level devices.
-
3 (v3.2)
This camera device is capable of YUV reprocessing and RAW data capture,
in addition to FULL-level capabilities. The stream configurations listed in the
LEVEL_,3 RAW,FULL,LEGACYandLIMITEDtables in the createCaptureSession documentation are guaranteed to be supported.The following additional capabilities are guaranteed to be supported:
YUV_capability (android.REPROCESSING request. available Capabilities contains YUV_)REPROCESSING RAWcapability (android.request. available Capabilities contains RAW)
-
EXTERNAL (v3.3)
This camera device is backed by an external camera connected to this Android device.
The device has capability identical to a LIMITED level device,
with the following exceptions: - The device may not report lens/
sensor related information such as - The device will report 0 for android.
sensor. orientation - The device has less guarantee on stable framerate,
as the framerate partly depends on the external camera being used.
- The device may not report lens/
Generally classifies the overall set of the camera device functionality.
3.
The supported hardware level is a high-level description of the camera device's
capabilities,LEGACY < LIMITED < FULL < LEVEL_.
Starting from LEVEL_,
//At a high level,
LEGACYdevices operate in a backwards-compatibility mode for older Android devices,and have very limited capabilities. LIMITEDdevices represent the baseline feature set,and may also include additional capabilities that are subsets of FULL.FULLdevices additionally support per-frame manual control of sensor,flash, lens and post-processing settings, and image capture at a high rate. LEVEL_devices additionally support YUV reprocessing and RAW image capture,3 along with additional output stream configurations. EXTERNALdevices are similar toLIMITEDdevices with exceptions like some sensor or lens information not reported or less stable framerates.
See the individual level enums for full descriptions of the supported capabilities.
Some features are not part of any particular hardware level or capability and must be
queried separately.
- Calibrated timestamps (android.
sensor. info. timestamp Source ==REALTIME) - Precision lens control (android.
lens. info. focus Distance Calibration ==CALIBRATED) - Face detection (android.
statistics. info. available Face Detect Modes) - Optical or electrical image stabilization
(android.
lens. info. available Optical Stabilization, android. control. available Video Stabilization Modes)
A camera HALv3 device can implement one of three possible operational modes; LIMITED,
FULL support or better is expected from new higher-end devices.
For full details refer to "S3.
Camera HAL3+ must not implement LEGACY mode.android. user-facing API only on legacy HALv1 devices,
EXTERNAL level devices have lower performance bar in CTS since the performance might depend
on the external camera being used and is not fully controlled by the device manufacturer.
A short string for manufacturer version information about the camera device,
3.
This can be used in TAG_
The string must consist of only alphanumeric characters,
-
HIDL_DEVICE_3_5 (v3.4)
This camera device supports and opts in to the buffer management APIs provided by HIDL ICameraDevice version 3.
5.
The version of buffer management API this camera device supports and opts into.
3.
When this key is not present,
This lists the mapping between a device folding state and
specific camera sensor orientation for logical cameras on a foldable device.
3.
Logical cameras on foldable devices can support sensors with different orientation
values.
3.
HAL must populate the array with
(hardware::camera::provider::V2_
- OFF (v3.2)
- ON (v3.2)
Whether black-level compensation is locked
to its current values,
3.
When set to true (ON),false (OFF).
Since changes to certain capture parameters (such as
exposure time) may require resetting of black level
compensation,
For example,
- Request 1: Exposure = 10ms,
Black level lock = OFF - Request 2: Exposure = 10ms,
Black level lock = ON - Request 3: Exposure = 10ms,
Black level lock = ON - Request 4: Exposure = 20ms,
Black level lock = ON - Request 5: Exposure = 20ms,
Black level lock = ON - Request 6: Exposure = 20ms,
Black level lock = ON
And the exposure change in Request 4 requires the camera
device to reset the black level offsets,
- Result 1: Exposure = 10ms,
Black level lock = OFF - Result 2: Exposure = 10ms,
Black level lock = ON - Result 3: Exposure = 10ms,
Black level lock = ON - Result 4: Exposure = 20ms,
Black level lock = OFF - Result 5: Exposure = 20ms,
Black level lock = ON - Result 6: Exposure = 20ms,
Black level lock = ON
This indicates to the application that on frame 4,
The camera device will maintain the lock to the extent
possible,
If for some reason black level locking is no longer possible
(for example,
- OFF (v3.2)
- ON (v3.2)
Whether black-level compensation is locked
to its current values,
3.
Whether the black level offset was locked for this frame.
If for some reason black level locking is no longer possible
(for example,
-
CONVERGING (v3.2)
-1
The current result is not yet fully synchronized to any request.
Synchronization is in progress,
and reading metadata from this result may include a mix of data that have taken effect since the last synchronization time. In some future result,
within android. sync. max Latency frames, this value will update to the actual frame number frame number the result is guaranteed to be synchronized to (as long as the request settings remain constant). -
UNKNOWN (v3.2)
-2
The current result's synchronization status is unknown.
The result may have already converged,
or it may be in progress. Reading from this result may include some mix of settings from past requests. After a settings change,
the new settings will eventually all take effect for the output buffers and results. However, this value will not change when that happens. Altering settings rapidly may provide outcomes using mixes of settings from recent requests. This value is intended primarily for backwards compatibility with the older camera implementations (for android.
hardware. Camera).
The frame number corresponding to the last request
with which the output result (metadata + buffers) has been fully
synchronized.
Either a non-negative value corresponding to a
frame_,
3.
When a request is submitted to the camera device,
In the latter case,
While a set of control changes are being propagated,
Once it is fully known that a set of control changes have been
finished propagating,
Older camera device implementations may not have a way to detect
when all camera controls have been applied,
FULL capability devices will always have this value set to the
frame number of the request corresponding to this result.
Further details:
- Whenever a request differs from the last request,
any future results not yet returned may have this value set to CONVERGING (this could include any in-progress captures not yet returned by the camera device, for more details see pipeline considerations below). - Submitting a series of multiple requests that differ from the
previous request (e.
g. r1, r2, r3 s. t. r1 != r2 != r3) moves the new synchronization frame to the last non-repeating request (using the smallest frame number from the contiguous list of repeating requests). - Submitting the same request repeatedly will not change this value
to CONVERGING,
if it was already a non-negative value. - When this value changes to non-negative,
that means that all of the metadata controls from the request have been applied, all of the metadata controls from the camera device have been read to the updated values (into the result), and all of the graphics buffers corresponding to this result are also synchronized to the request.
Pipeline considerations:
Submitting a request with updated controls relative to the previously
submitted requests may also invalidate the synchronization state
of all the results corresponding to currently in-flight requests.
In other words,
Using UNKNOWN here is illegal unless android.
FULL capability devices should simply set this value to the
frame_ of the request this result corresponds to.
-
PER_FRAME_CONTROL (v3.2)
0
Every frame has the requests immediately applied.
Changing controls over multiple requests one after another will produce results that have those controls applied atomically each frame.
All FULL capability devices will have this as their maxLatency.
-
UNKNOWN (v3.2)
-1
Each new frame has some subset (potentially the entire set) of the past requests applied to the camera settings.
By submitting a series of identical requests,
the camera device will eventually have the camera settings applied, but it is unknown when that exact point will be. All LEGACY capability devices will have this as their maxLatency.
The maximum number of frames that can occur after a request
(different than the previous) has been submitted,
A positive value,
3.
This defines the maximum distance (in number of metadata results),
In other words this acts as an upper boundary for how many frames
must occur before the camera device knows for a fact that the new
submitted camera settings have been applied in outgoing frames.
For example if maxLatency was 2,
initial request = X (repeating)
request1 = X
request2 = Y
request3 = Y
request4 = Y
where requestN has frameNumber N,Since result4 has a frameNumber == 4 and
android.,4 - 2 = 2.
Use frame_ from camera3_CaptureResult#getFrameNumber.
LIMITED devices are strongly encouraged to use a non-negative
value.
The amount of exposure time increase factor applied to the original output
frame by the application processing before sending for reprocessing.
>= 1.
3.
This is optional,
For some YUV reprocessing use cases,
For example,
This is relative factor,
This control is only effective for YUV reprocessing capture request.android..android..
The amount of exposure time increase factor applied to the original output
frame by the application processing before sending for reprocessing.
>= 1.
3.
This is optional,
For some YUV reprocessing use cases,
For example,
This is relative factor,
This control is only effective for YUV reprocessing capture request.android..android..
The maximal camera capture pipeline stall (in unit of frame count) introduced by a
reprocess capture request.
<= 4
3.
The key describes the maximal interference that one reprocess (input) request
can introduce to the camera simultaneous streaming of regular (output) capture
requests,
When a reprocessing capture request is submitted while a camera output repeating request
(e.
If this key reports 0,
This key is supported if the camera device supports PRIVATE or YUV reprocessing (
i.
Maximum number of points that a depth point cloud may contain.
3.
If a camera device supports outputting depth range data in the form of a depth point
cloud (Image
Any given buffer may contain between 0 and maxDepthSamples points,
- OUTPUT (v3.2)
- INPUT (v3.2)
The available depth dataspace stream
configurations that this camera device supports
(i.
3.
These are output stream configurations for use with
dataSpace HAL_(format, tuples.
Only devices that support depth output for at least
the HAL_
A device that also supports the HAL_(HAL_ in addition to
the entries for HAL_
This lists the minimum frame duration for each
format/
3.
This should correspond to the frame duration when only that
stream is active,
When multiple streams are used in a request,
The minimum frame duration of a stream (of a particular format,
See android.
This lists the maximum stall duration for each
output format/
3.
A stall duration is how much extra time would get added
to the normal minimum frame duration for a repeating request
that has streams with non-zero stall.
This functions similarly to
android.
All depth output stream formats may have a nonzero stall
duration.
- FALSE (v3.2)
- TRUE (v3.2)
Indicates whether a capture request may target both a
DEPTH16 /
3.
If TRUE,
Typically,
Recommended depth stream configurations for common client use cases.
3.
Optional subset of the android.
Recommended depth configurations are expected to be declared with SNAPSHOT and/
- OUTPUT (v3.4)
- INPUT (v3.4)
The available dynamic depth dataspace stream
configurations that this camera device supports
(i.
3.
These are output stream configurations for use with
dataSpace DYNAMIC_(format, tuples.
Only devices that support depth output for at least
the HAL_
Do not set this property directly.
This lists the minimum frame duration for each
format/
3.
This should correspond to the frame duration when only that
stream is active,
When multiple streams are used in a request,
The minimum frame duration of a stream (of a particular format,
Do not set this property directly.
This lists the maximum stall duration for each
output format/
3.
A stall duration is how much extra time would get added
to the normal minimum frame duration for a repeating request
that has streams with non-zero stall.
All dynamic depth output streams may have a nonzero stall
duration.
Do not set this property directly.
- OUTPUT (v3.6)
- INPUT (v3.6)
The available depth dataspace stream
configurations that this camera device supports
(i.
3.
Analogous to android.
This lists the minimum frame duration for each
format/
3.
Analogous to android.
See android.
This lists the maximum stall duration for each
output format/
3.
Analogous to android.
- OUTPUT (v3.6)
- INPUT (v3.6)
The available dynamic depth dataspace stream
configurations that this camera device supports (i.
3.
Analogous to android.
Do not set this property directly.
This lists the minimum frame duration for each
format/
3.
Analogous to android.
Do not set this property directly.
This lists the maximum stall duration for each
output format/
3.
Analogous to android.
Do not set this property directly.
String containing the ids of the underlying physical cameras.
3.
For a logical camera,
For example,
The number of physical camera IDs must be no less than 2.
-
APPROXIMATE (v3.3)
A software mechanism is used to synchronize between the physical cameras.
As a result, the timestamp of an image from a physical stream is only an approximation of the image sensor start-of-exposure time. -
CALIBRATED (v3.3)
The camera device supports frame timestamp synchronization at the hardware level,
and the timestamp of a physical stream image accurately reflects its start-of-exposure time.
The accuracy of frame timestamp synchronization between physical cameras
3.
The accuracy of the frame timestamp synchronization determines the physical cameras'
ability to start exposure at the same time.
In both cases,
This tag is only applicable if the logical camera device supports concurrent physical
streams from different physical cameras.
String containing the ID of the underlying active physical camera.
3.
The ID of the active physical camera that's backing the logical camera.
For a logical camera made up of physical cameras where each camera's lenses have
different characteristics,
This key will be available if the camera device advertises this key via CameraCharacteristics#getAvailableCaptureResultKeys.
Staring from HIDL ICameraDevice version 3.
-
OFF (v3.3)
No distortion correction is applied.
-
FAST (v3.3)
Lens distortion correction is applied without reducing frame rate relative to sensor output.
It may be the same as OFF if distortion correction would reduce frame rate relative to sensor. -
HIGH_QUALITY (v3.3)
High-quality distortion correction is applied,
at the cost of possibly reduced frame rate relative to sensor output.
Mode of operation for the lens distortion correction block.
3.
The lens distortion correction block attempts to improve image quality by fixing
radial,
OFF means no distortion correction is done.
FAST/
The correction only applies to processed outputs such as YUV,
This control will be on by default on devices that support this control.
The full list of metadata that is affected in this way by distortion correction is:
List of distortion correction modes for android.
Any value listed in android.
3.
No device is required to support this API; such devices will always list only 'OFF'.
HAL must support both FAST and HIGH_
-
OFF (v3.3)
No distortion correction is applied.
-
FAST (v3.3)
Lens distortion correction is applied without reducing frame rate relative to sensor output.
It may be the same as OFF if distortion correction would reduce frame rate relative to sensor. -
HIGH_QUALITY (v3.3)
High-quality distortion correction is applied,
at the cost of possibly reduced frame rate relative to sensor output.
Mode of operation for the lens distortion correction block.
3.
The lens distortion correction block attempts to improve image quality by fixing
radial,
OFF means no distortion correction is done.
FAST/
The correction only applies to processed outputs such as YUV,
This control will be on by default on devices that support this control.
The full list of metadata that is affected in this way by distortion correction is:
- FALSE (v3.4)
- TRUE (v3.4)
Whether this camera device can support identical set of stream combinations
involving HEIC image format,
3.
All the static,
If a camera device supports HEIC format (ISO/
For every HEIC stream configured by the application,
- A YUV_
420_ 888 or IMPLEMENTATION_ DEFINED HAL stream as input to HEIC or HEVC encoder. - A BLOB stream with JPEG_
APPS_ SEGMENTS dataspace to extract application markers including EXIF and thumbnail to be saved in HEIF container.
A camera device can output HEIC format to the application if and only if:
- The system contains a HEIC or HEVC encoder with constant quality mode,
and - This tag is set to TRUE,
meaning that camera HAL supports replacing JPEG streams in all mandatory stream combinations with a [YUV_ 420_ 888/ IMPLEMENTATION_ DEFINED stream + JPEG_ APPS_ SEGMENT BLOB stream] combo.
As an example,
- IMPLEMENTATION_
DEFINED/ YUV_ 420_ 888 MAXIMUM + JPEG_ SEGMENTS_ BLOB, - PRIV PREVIEW + IMPLEMENTATION_
DEFINED/ YUV_ 420_ 888 MAXIMUM + JPEG_ SEGMENTS_ BLOB, - YUV PREVIEW + IMPLEMENTATION_
DEFINED/ YUV_ 420_ 888 MAXIMUM + JPEG_ SEGMENTS_ BLOB, - PRIV PREVIEW + YUV PREVIEW + IMPLEMENTATION_
DEFINED/ YUV_ 420_ 888 MAXIMUM + JPEG_ SEGMENTS_ BLOB
The selection logic between YUV_
if (HEIC encoder exists and supports the size) {
use IMPLEMENTATION_The maximum number of Jpeg APP segments supported by the camera HAL device.
3.
The camera framework will use this value to derive the size of the BLOB buffer with
JPEG_
n * (2 + 0xFFFF) + sizeof(struct CameraBlob)
where 2 is number of bytes for APP marker,
The value of this tag must be at least 1,
Since media encoder embeds the orientation in the metadata of the output image,
APP1 segment is followed immediately by one or multiple APP2 segments,
The value of this tag must not be more than 16.
- OUTPUT (v3.4)
- INPUT (v3.4)
The available HEIC (ISO/
3.
The configurations are listed as (format, tuples.
If the camera device supports HEIC image format,
All the static,
These are output stream configurations for use with dataSpace HAL_
Do not set this property directly.
This lists the minimum frame duration for each
format/
3.
This should correspond to the frame duration when only that
stream is active,
When multiple streams are used in a request,
See android.
Do not set this property directly.
This lists the maximum stall duration for each
output format/
3.
A stall duration is how much extra time would get added
to the normal minimum frame duration for a repeating request
that has streams with non-zero stall.
This functions similarly to
android.
All HEIC output stream formats may have a nonzero stall
duration.
Do not set this property directly.
- OUTPUT (v3.6)
- INPUT (v3.6)
The available HEIC (ISO/
3.
Refer to android.
These are output stream configurations for use with dataSpace HAL_
Do not set this property directly.
This lists the minimum frame duration for each
format/
3.
Refer to android.
Do not set this property directly.
This lists the maximum stall duration for each
output format/
3.
Refer to android.
Do not set this property directly.
-
EXTERIOR_OTHER (v3.8)
The camera device faces the outside of the vehicle body frame but not exactly one of the exterior sides defined by this enum.
Applications should determine the exact facing direction from android. lens. pose Rotation and android. lens. pose Translation. -
EXTERIOR_FRONT (v3.8)
The camera device faces the front of the vehicle body frame.
-
EXTERIOR_REAR (v3.8)
The camera device faces the rear of the vehicle body frame.
-
EXTERIOR_LEFT (v3.8)
The camera device faces the left side of the vehicle body frame.
-
EXTERIOR_RIGHT (v3.8)
The camera device faces the right side of the vehicle body frame.
-
INTERIOR_OTHER (v3.8)
The camera device faces the inside of the vehicle body frame but not exactly one of seats described by this enum.
Applications should determine the exact facing direction from android. lens. pose Rotation and android. lens. pose Translation. -
INTERIOR_SEAT_ROW_1_LEFT (v3.8)
The camera device faces the left side seat of the first row.
-
INTERIOR_SEAT_ROW_1_CENTER (v3.8)
The camera device faces the center seat of the first row.
-
INTERIOR_SEAT_ROW_1_RIGHT (v3.8)
The camera device faces the right seat of the first row.
-
INTERIOR_SEAT_ROW_2_LEFT (v3.8)
The camera device faces the left side seat of the second row.
-
INTERIOR_SEAT_ROW_2_CENTER (v3.8)
The camera device faces the center seat of the second row.
-
INTERIOR_SEAT_ROW_2_RIGHT (v3.8)
The camera device faces the right side seat of the second row.
-
INTERIOR_SEAT_ROW_3_LEFT (v3.8)
The camera device faces the left side seat of the third row.
-
INTERIOR_SEAT_ROW_3_CENTER (v3.8)
The camera device faces the center seat of the third row.
-
INTERIOR_SEAT_ROW_3_RIGHT (v3.8)
The camera device faces the right seat of the third row.
The direction of the camera faces relative to the vehicle body frame and the
passenger seats.
3.
This enum defines the lens facing characteristic of the cameras on the automotive
devices with locations android.
When android.
When android.
If a camera has INTERIOR_
-
INTERIOR (v3.8)
The camera device exists inside of the vehicle cabin.
-
EXTERIOR_OTHER (v3.8)
The camera exists outside of the vehicle body frame but not exactly on one of the exterior locations this enum defines.
The applications should determine the exact location from android. lens. pose Translation. -
EXTERIOR_FRONT (v3.8)
The camera device exists outside of the vehicle body frame and on its front side.
-
EXTERIOR_REAR (v3.8)
The camera device exists outside of the vehicle body frame and on its rear side.
-
EXTERIOR_LEFT (v3.8)
The camera device exists outside and on left side of the vehicle body frame.
-
EXTERIOR_RIGHT (v3.8)
The camera device exists outside and on right side of the vehicle body frame.
-
EXTRA_OTHER (v3.8)
The camera device exists on an extra vehicle,
such as the trailer, but not exactly on one of front, rear, left, or right side. Applications should determine the exact location from android. lens. pose Translation. -
EXTRA_FRONT (v3.8)
The camera device exists outside of the extra vehicle's body frame and on its front side.
-
EXTRA_REAR (v3.8)
The camera device exists outside of the extra vehicle's body frame and on its rear side.
-
EXTRA_LEFT (v3.8)
The camera device exists outside and on left side of the extra vehicle body.
-
EXTRA_RIGHT (v3.8)
The camera device exists outside and on right side of the extra vehicle body.
Location of the cameras on the automotive devices.
3.
This enum defines the locations of the cameras relative to the vehicle body frame on
the automotive sensor coordinate system.
- INTERIOR is the inside of the vehicle body frame (or the passenger cabin).
- EXTERIOR is the outside of the vehicle body frame.
- EXTRA is the extra vehicle such as a trailer.
Each side of the vehicle body frame on this coordinate system is defined as below:
- FRONT is where the Y-axis increases toward.
- REAR is where the Y-axis decreases toward.
- LEFT is where the X-axis decreases toward.
- RIGHT is where the X-axis increases toward.
If the camera has either EXTERIOR_