# Gabeldorsche Architecture [TOC] This document outlines some architectural considerations we've made when developing the Gabeldorsche (GD) Bluetooth stack. ## Threading model First of all, the GD stack does not build on concepts of threads. Instead, it works with [`Handlers`](#handler). However, since GD ultimately runs on an OS, it still needs to interact with processes and threads before achieving the [`Handler`](#handler) abstraction. ### Processes In general. three types of processes exist in the GD runtime environment: **Application processes** : include third-party apps, other system components such as audio and telecom services that interact with the _Bluetooth stack process_ APIs defined through various RPC/IPC methods such as Binder, Socket IPC, gRPC, DBUS. and so on, using languages such as AIDL or Protobuf. For Android applications, although APIs are defined in AIDL, some boiler plate code is wrapped in Java libraries exposed through code in [`frameworks/base/core/java/android/bluetooth`](https://android.googlesource.com/platform/frameworks/base/+/refs/heads/master/core/java/android/bluetooth/) that is released to developers as [Android SDK](https://developer.android.com/guide/topics/connectivity/bluetooth). **Hardware abstraction layer (HAL) processes** : one or many processes from the vendor partition, and hence is hardware depenedent. They interact with the _Bluetooth stack process_ via a set of hardware abstraction APIs defined through RPC/IPC methods such as Binder, Socket IPC, DBUS, and so on, using languages such as HIDL. On Android, this would be HAL processes that implement HIDL APIs such as [IBluetoothHci](https://android.googlesource.com/platform/hardware/interfaces/+/refs/heads/master/bluetooth/1.1/IBluetoothHci.hal) and [IBluetoothAudioProvider](https://android.googlesource.com/platform/hardware/interfaces/+/refs/heads/master/bluetooth/audio/2.0/IBluetoothAudioProvider.hal). **Bluetooth stack process** : typically one single process that implements various Bluetooth protocols and profiles above the Host Controller Interface (HCI) and below the Bluetooth SDK APIs. On one hand, it servces the requests from _Application processes_; on the other hand, it forwards these requests via interactions with _HAL processes_. On Android, this process typically runs under AID_BLUETOOTH (usually 1002) with process name "com.android.bluetooth". The process is started in Java and loads native libraries through JNI. Other systems that do not use Java virtual machine may have a pure native process. Multiple threads may exist in this process for various reasons. The GD stack runs entirely in this process. ### Threads in Bluetooth stack process Currently, the goals of thread optimization in the Bluetooth stack are: * Reduce the number of threads as much as possible to simplify synchronization * Do blocking I/O operations in separate threads * Try moving I/O operations into polling mode so that we can use event driven methods to interact with it on main thread * Move alarm and timer mechanisms to their calling threads to avoid a separate alarm thread * Isolate individual components so that each component can be started and stopped individually without terminating the main thread * Prefer data passing over data sharing among threads to reduce locking and race conditions After above optimization, we are left with five main types of threads within the native code: **Main thread** : The main workhorse in the Bluetooth stack. The thread's execution context is further divided into [`Handlers`](#handler) that reside in individual [`Modules`](#module). This thread can be divided further into smaller ones if performance is constrained on the running platform. Deployer just needs to bind handlers to different threads and that should not affect the overall operation. **JNI thread** : In the native thread, we treat the Java layer as a separate application as its threading module is completely different. Therefore, we put a thread between these two layers to buffer any blocking operation. **HCI thread (or other HW I/O thread)** : This thread is responsible for deadling with hardware I/O and can be potentially blocking. Hence it has its separate thread to avoid blocking the main thread. **Audio worker thread** : Responsible for audio encoding and decoding operations that require higher precision execution timing. Such worker has its separate thread to avoid being affected by the main thread. **Socket I/O thread** : Communicate with various applications that uses the [`BluetootSocket`](https://developer.android.com/reference/android/bluetooth/BluetoothSocket) interface. It has its sepearate thread due to potential I/O delay. ### Data flow diagram Function invocations between different components are abstracted as control packets (function closure) passed through queues. Data flow between components are data packets sent through queues, signaled using [`Reactor`](#reactor). They will merge to the input queue for each component. We define three types of queues: **Non-blocking queue** : When users try to dequeue when it’s empty, or enqueue when it’s full, it will return immediately. All queueing within a thread must be non-blocking, because otherwise it will deadlock. **Blocking queue** : When users try to dequeue when it’s empty, or enqueue when it’s full, it will block, until other thread makes the queue to be writable/readable. It can be used as a flow control mechanism to avoid too many packets from user thread. **Leaky queue** : Same as non-blocking queue, but it will flush when it’s full and user tries to enqueue. This is useful for audio encoding. 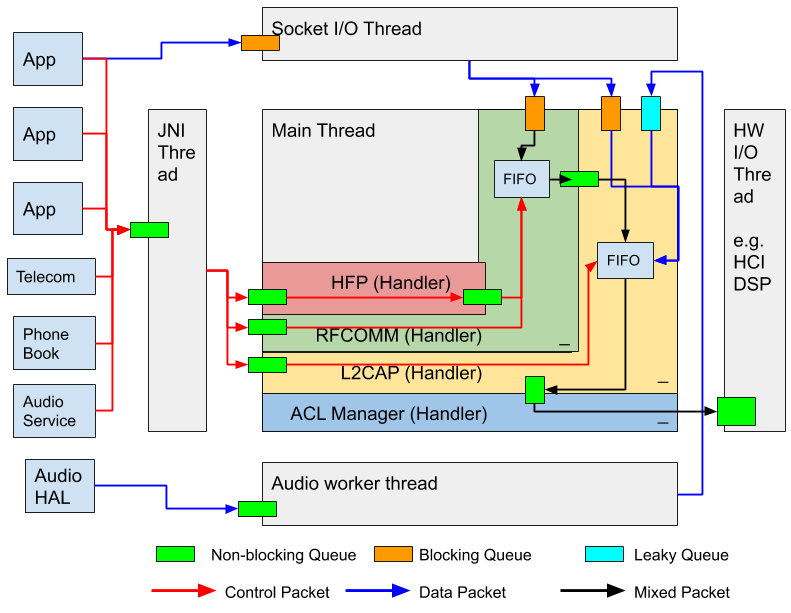 ## Building blocks ### Module {#module} Code in GD is packed into C++ objects called [`Module`](https://android.googlesource.com/platform/packages/modules/Bluetooth/system/+/master/gd/module.h). A module standardized the following aspects of GD code: * **Dependencies**: A module provides its own dependencies on other modules by implementing `ListDependencies()` * **Life Cycle**: A module must implement `Start()` and `Stop()` life cycle methods * **Threading Module**: The `Module` base class provides a `Handler` for code execution context via `GetHandler()` * **Metrics**: A `Module` can dump its state information for dumpsys through `DumpState()` See its definition at: https://android.googlesource.com/platform/packages/modules/Bluetooth/system/+/master/gd/module.h ### Handler {#handler} Similar to [`android.os.Handler`](https://developer.android.com/reference/android/os/Handler), [`bluetooth::os::Handler`](https://android.googlesource.com/platform/packages/modules/Bluetooth/system/+/master/gd/os/handler.h) provides a sequential execution context while hiding the concept of thread from the executing code. By scoping execution context into smaller areas, `Handler` benefits development in the following ways: * Less need for locking due to sequential execution context * Smaller context leads to easier management of code flow * Separation from thread gives system deployer more freedom to tweak the underlying thread allocation. For example, for real time OS without full thread implementation, a `Handler` can be used to provide a near-thread execution context Of course, there are downsides of using `Handler`, which developers should be cautious about: WARNING: Although multiple `Handler` could bind to the same thread, `Handler` does not gurantee sequential execution of code across different `Handler` even when the are on the same thread. WARNING: Locking among `Handlers` that were bound to the same thread may result in deadlock WARNING: Data must be copied between `Handler` to avoid both deadlock and race condition See its definition at: https://android.googlesource.com/platform/packages/modules/Bluetooth/system/+/master/gd/os/handler.h ### Reactor {#reactor} [`bluetooth::os:Reactor`](https://android.googlesource.com/platform/packages/modules/Bluetooth/system/+/master/gd/os/reactor.h) implements the [Reactor Design Pattern](https://en.wikipedia.org/wiki/Reactor_pattern), in which concurrent _Events_ are demultiplexed by a _Synchronous Event Demultiplexer_ to a list of _Request Handlers_ registered through a _Dispatcher_. In a generic Linux operating system, such as Android, we implemented it using file descriptors such as [eventfd](http://man7.org/linux/man-pages/man2/eventfd.2.html) for `Handler`, [timerfd](http://man7.org/linux/man-pages/man2/timerfd_create.2.html) for `Alarm`, and [socketfd](http://man7.org/linux/man-pages/man2/socket.2.html) for data processing pipelines. In the context of file descriptors, events are catigorized into two types: * **OnReadReady**: means that the demultiplexer has some events for the handler and the handler can read at least one event from the underlying event queue. This is often associated with `EPOLLIN`, `EPOLLHUP`, `EPOLLRDHUP`, and `EPOLLERR`. * **OnWriteReady**: means that the demultiplexer is ready to consume more events from this handler, and the handler can write at least one event to the underlying queue. this is often associated with `EPOLLOUT`. This pattern naturally creates a back pressure from one queue to another without any extra signaling mechanism. When used in networking stack like ours, it simplifies the signaling code flow. See its definition at: https://android.googlesource.com/platform/packages/modules/Bluetooth/system/+/master/gd/os/reactor.h A pure data use case of `Reactor` is a `Reactive Queue`, see its definition at: https://android.googlesource.com/platform/packages/modules/Bluetooth/system/+/master/gd/os/queue.h ## Packet Definition Language (PDL) Packet parsing and serialization has been a big part of any networking stack. It is usually the first snippet of code that interface with a remote device. In the past, this has been achieved manually using macros like `STREAM_TO_UNIT8` or `UINT8_TO_STREAM`. This manual method is tedious and errorprone. To fix this, we created a Packet Definition Language that defines networking packet structure to the bits level. C++ headers and Python bindings will be automatically generated from its code generator and any fixes to the code generator will apply systematically to all packet code generated. Example PDL: ``` // Comments little_endian_packets // Whether this packet is big or small endian // Include header from other C++ header files custom_field SixBytes : 48 "packet/parser/test/" // expect six_bytes.h custom_field Variable "packet/parser/test/" // expect variable.h // A packet packet Parent { _fixed_ = 0x12 : 8, // fixed field 0x12 that takes 8 bits _size_(_payload_) : 8, // Size field that takes 8 bits _payload_, // special payload field of variable size footer : 8, // fiexed size footer of 8 bits } packet Child : Parent { field_name : 16, // addition field append after Parent } // an enum of 4 bits enum FourBits : 4 { ONE = 1, TWO = 2, THREE = 3, FIVE = 5, TEN = 10, LAZY_ME = 15, } ``` See its documentation at: https://android.googlesource.com/platform/packages/modules/Bluetooth/system/+/master/gd/packet/parser/README ## Calling convention between modules ### Asynchronous server-client model For most communication among modules, developers should assume an asynchronous server-client model in a generic model like: ```c++ // Define callback function type using CallbackFunction = std::function; // Asynchronous method definition bool Foo(Parameter param, CallbackFunction callback); // A new callback is passed for each asynchronous call // Always prefer lambda over std::bind CallbackFunction callback = [this] { // do something }; Parameter param = { // something }; if (Foo(param, callback)) { // The callback will be invoked // Callback must be invoked in the future } else { // Failed, no need to wait } ``` Many protocols and profiles fit into such model such as `AclManager` and `L2cap`. ### Synchronous database model In some cases, an asynchronous server-client model is not feasible. In this case, developers can consider a synchronous database model. In such a model, operations can happen synchronously with help of mutex. When the method returns, the changes must be reflected to all dependencies. Any changes in the internal states must be applied atomically. ```c++ // Synchronous method definition void Foo(Parameter param, Output* output); int Bar(Parameter param); Parameter param = { // something }; Output output = {}; Foo(param, &output); // output can be used immediately int bar_output = Bar(param); // bar_output can be used immediately ``` Many storage and informational modules fit into this model such as `Metrics` and `Storage`.